







 本文档介绍了ROS的发展现状,重点讲解了一键安装ROS的方法,包括Ubuntu18.04上安装ROS Melodic的详细步骤,并提供了安装前的系统准备和作业。此外,还演示了如何运行ROS的第一个实例——小海龟模拟器,通过控制台命令启动相关节点进行操作。
本文档介绍了ROS的发展现状,重点讲解了一键安装ROS的方法,包括Ubuntu18.04上安装ROS Melodic的详细步骤,并提供了安装前的系统准备和作业。此外,还演示了如何运行ROS的第一个实例——小海龟模拟器,通过控制台命令启动相关节点进行操作。

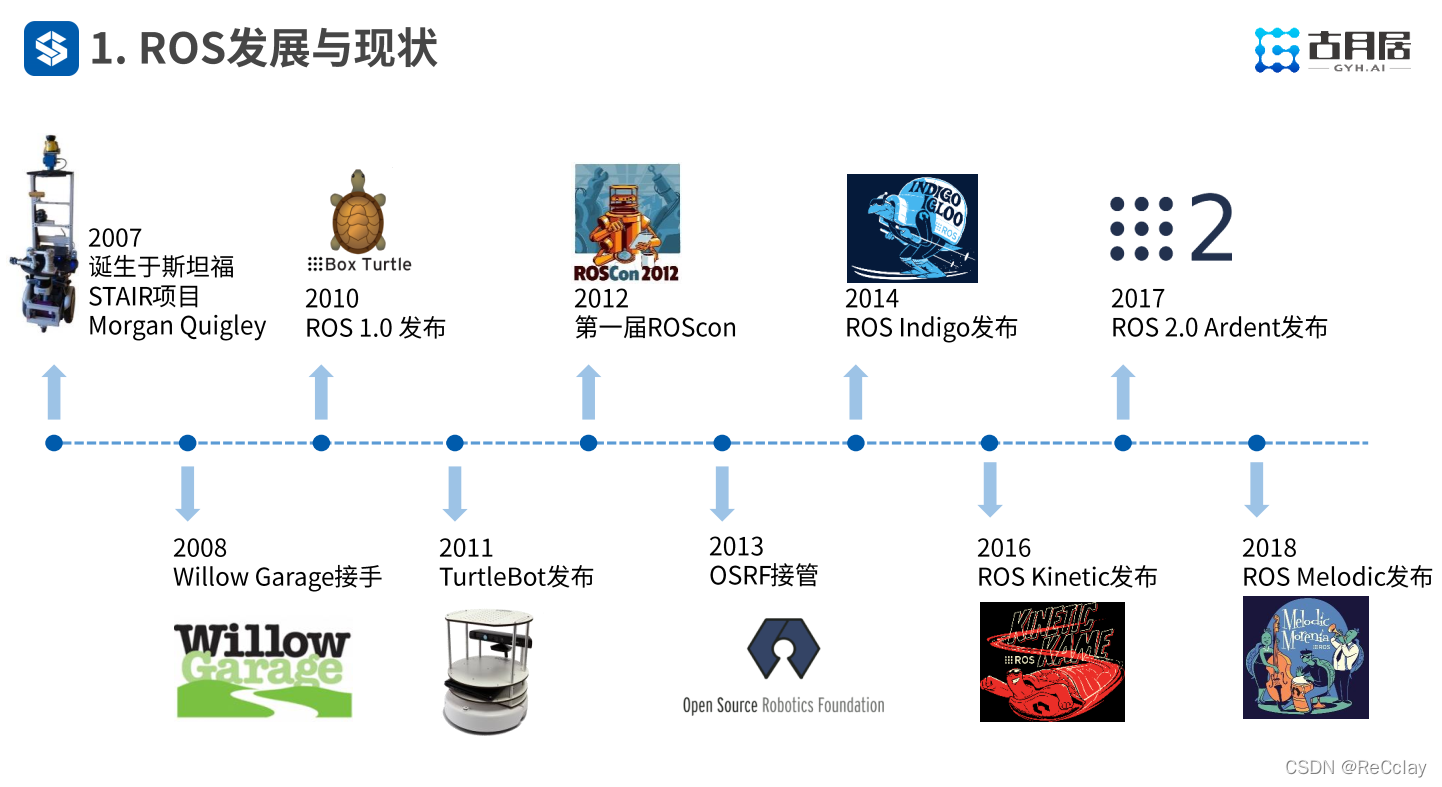
一、ROS发展与现状


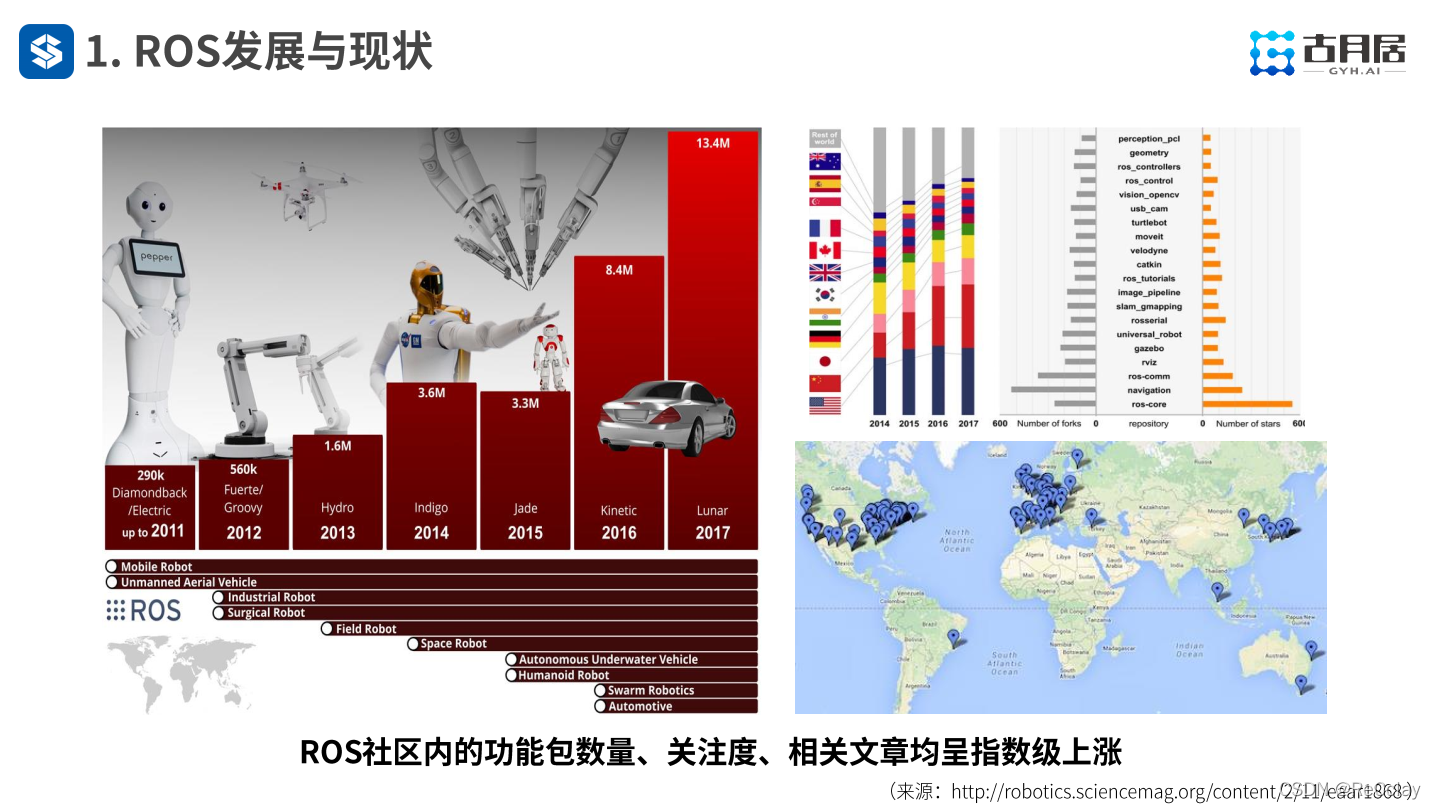


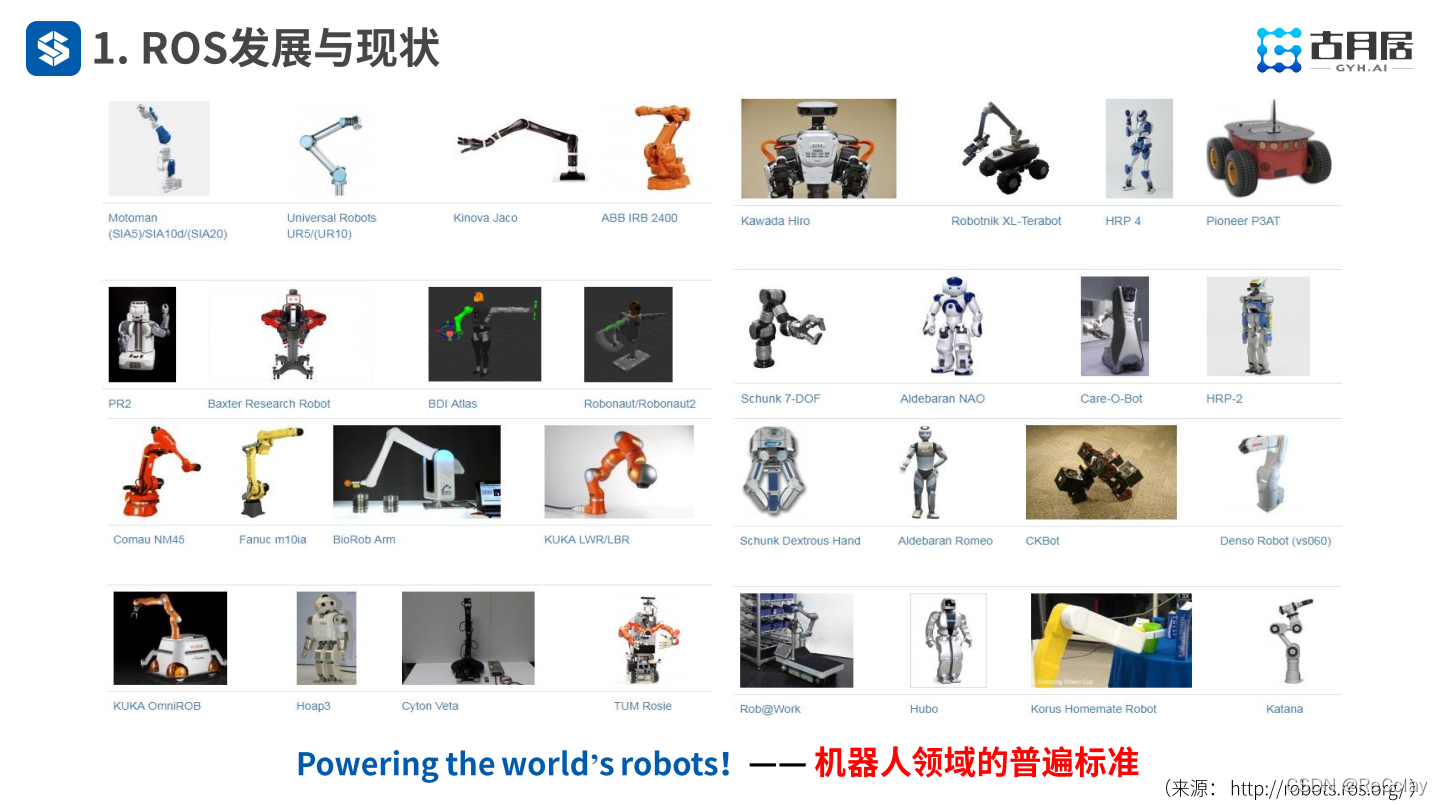
口号:驱动世界所有的机器人!


ROS1.0 更多的还是面向科研界,ROS2.0则是面向工业界!
二、课程内容概要

二、课程内容提要


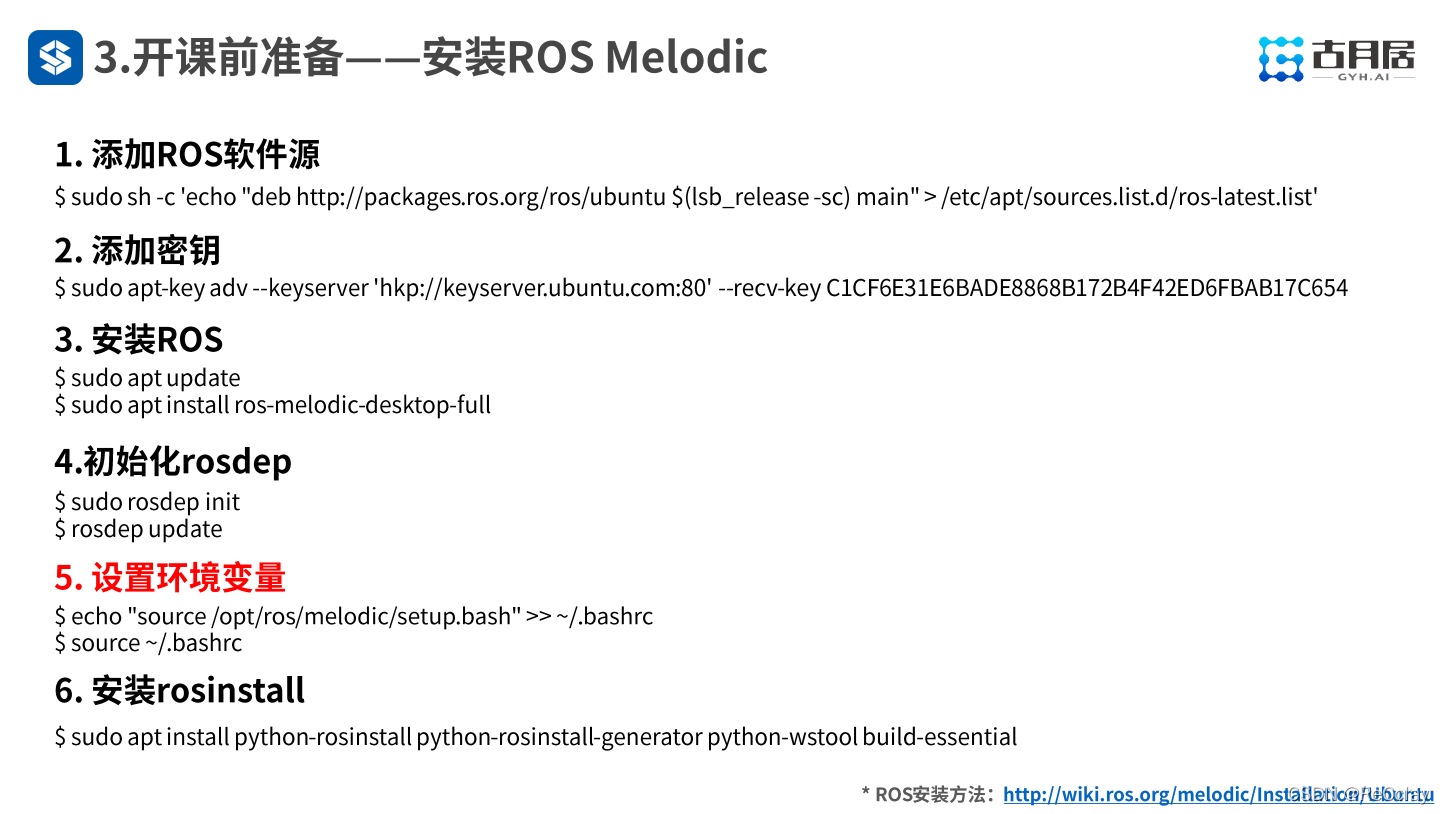
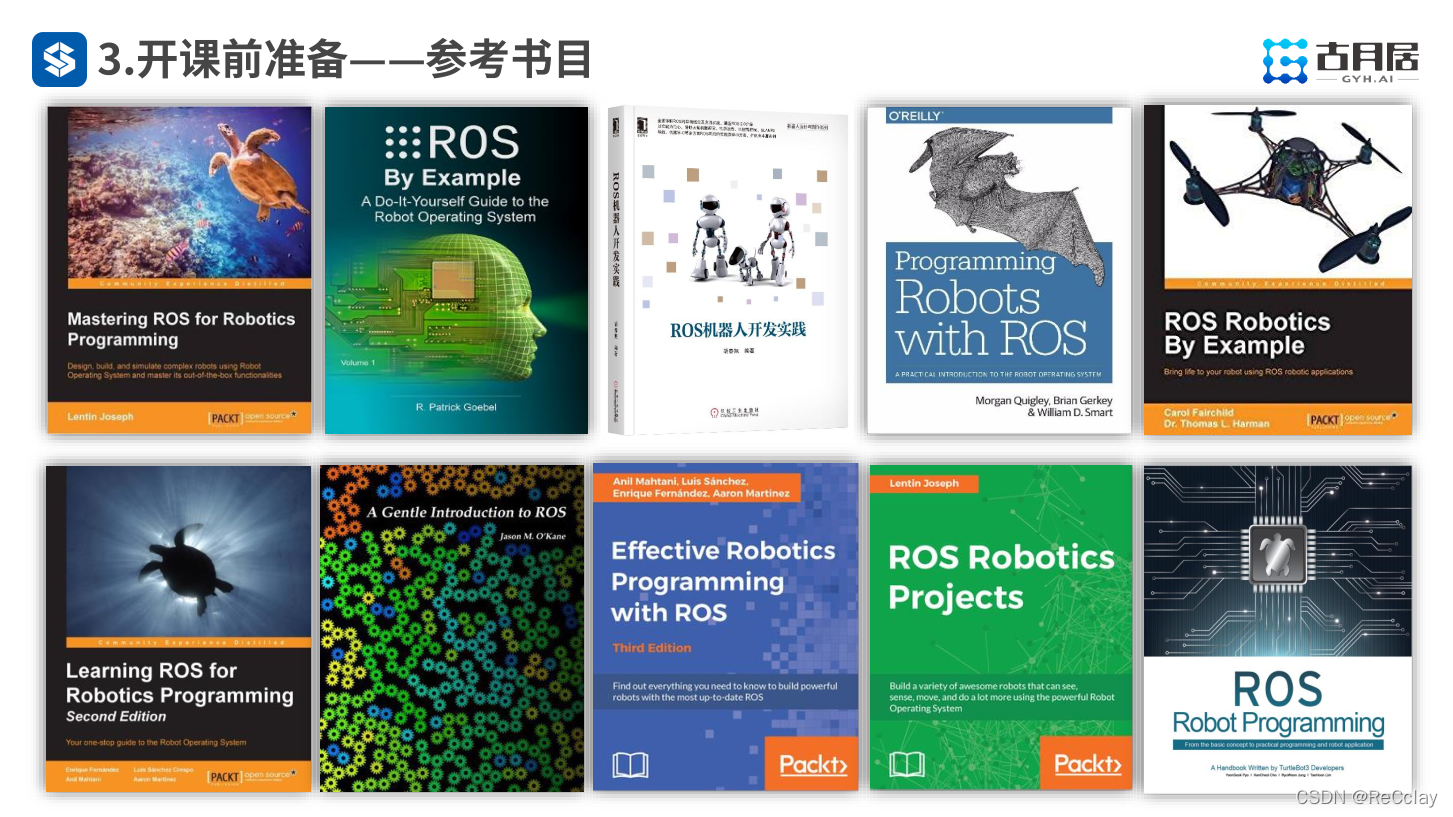
三、开课前准备

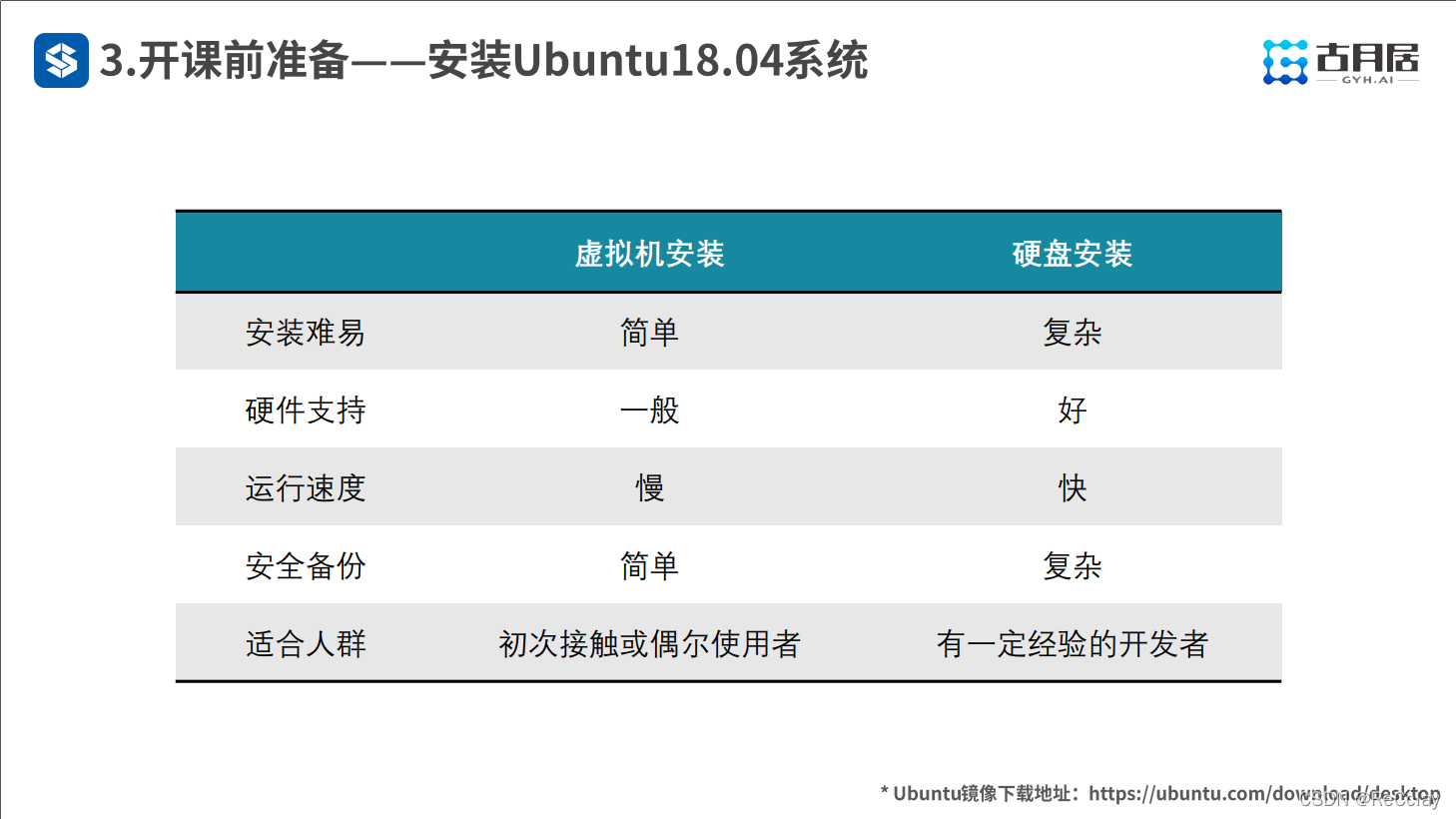
虚拟机主要是运行速度和显卡支持上不是很好!

四、作业:傻瓜式一键安装ROS
这里非常感谢“鱼香ros”大佬提供的傻瓜式一键安装ROS脚本!
4.1、准备工作
安装之前,先确保自己已经换好国内镜像源,最好是清华源,如下图所示:
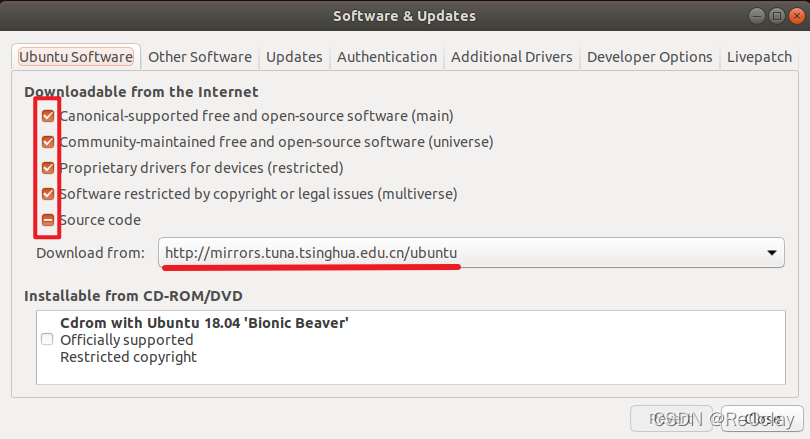
更换好之后务必更新和升级一下软件,命令如下所示:
sudo apt-get update
sudo apt-get upgrade
4.2、正式安装
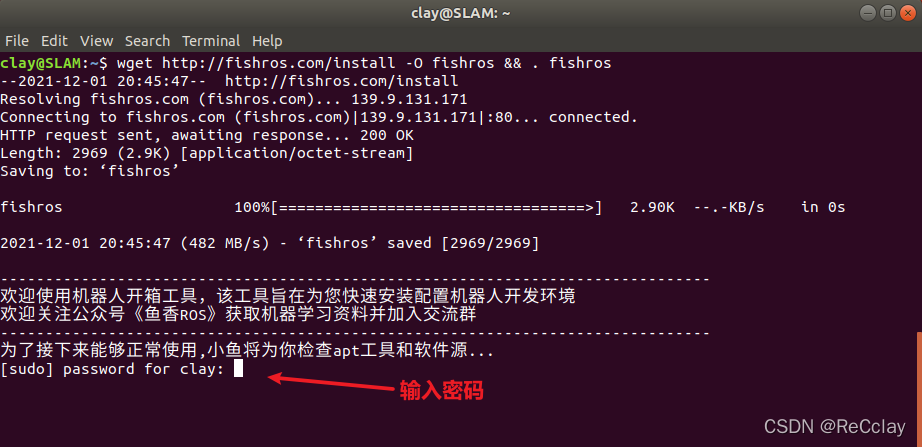
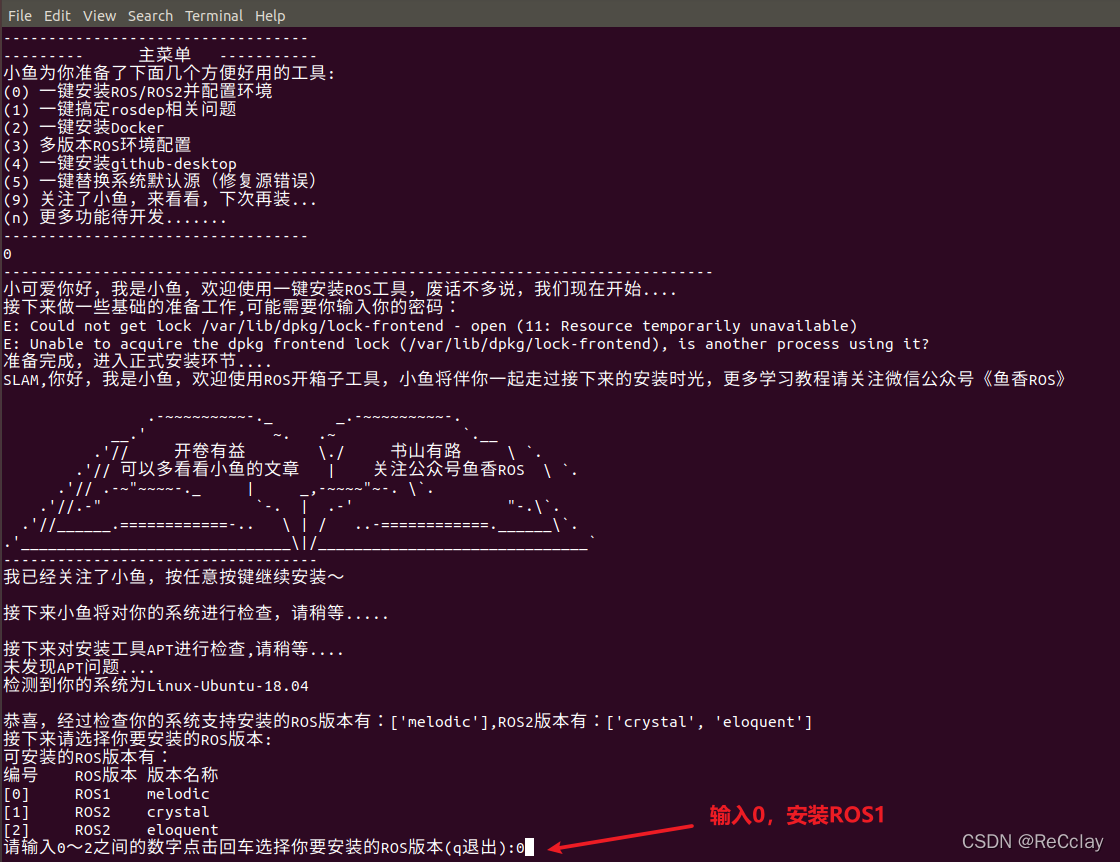
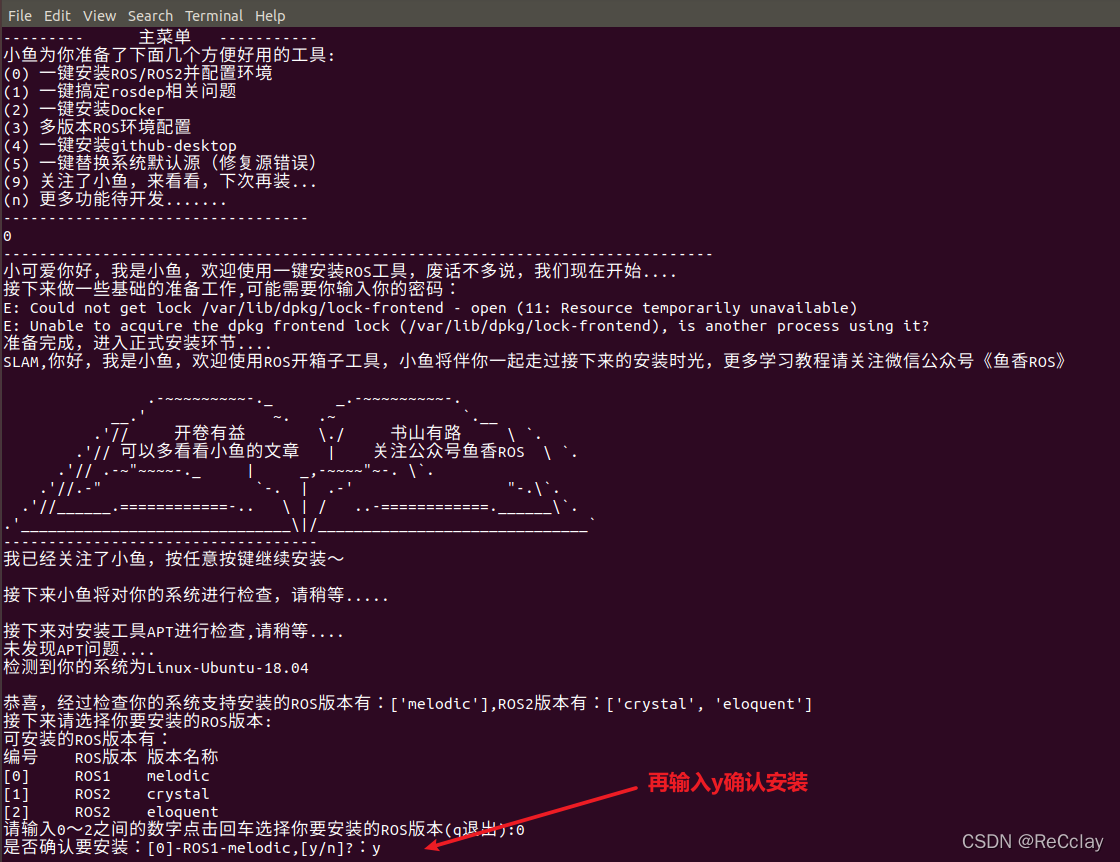
傻瓜式一键安装ROS方法:在终端输入以下命令,即可自动安装ros开发环境(以Ubuntu18.04的Melodic为例)
wget http://fishros.com/install -O fishros && . fishros
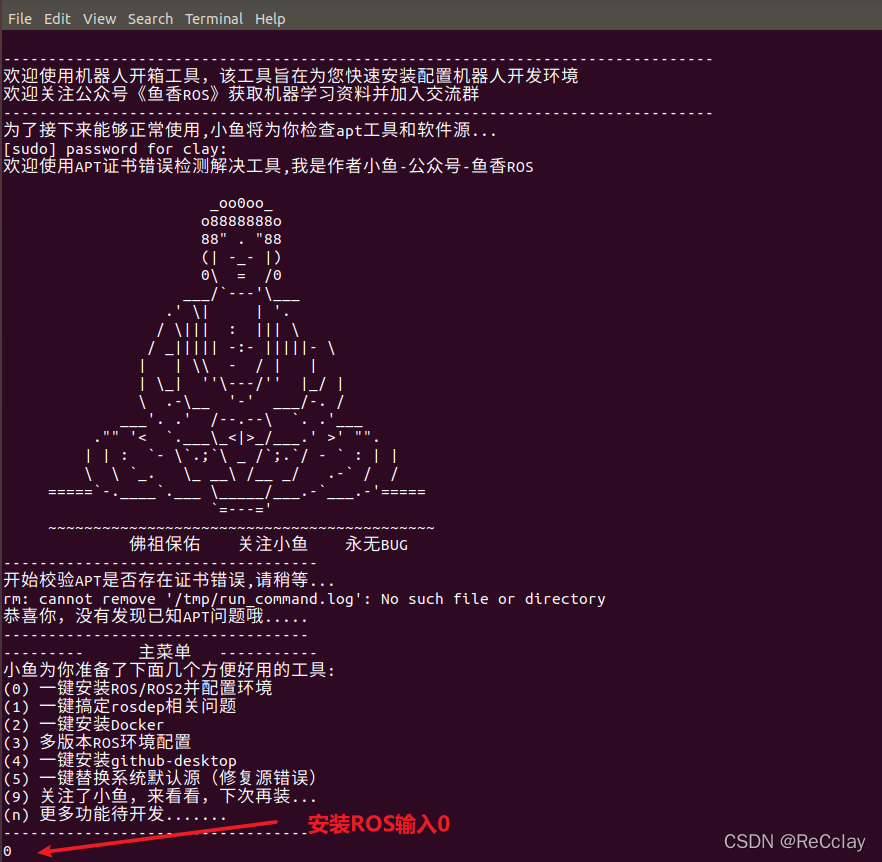
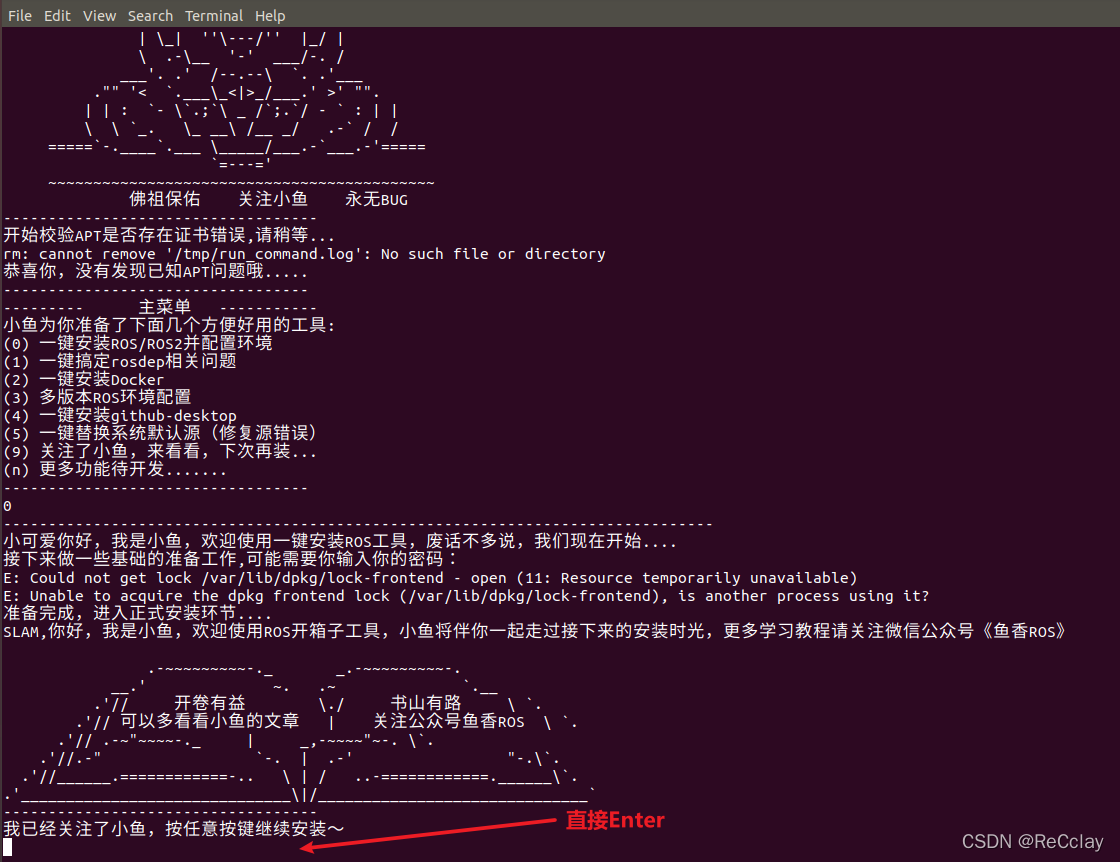
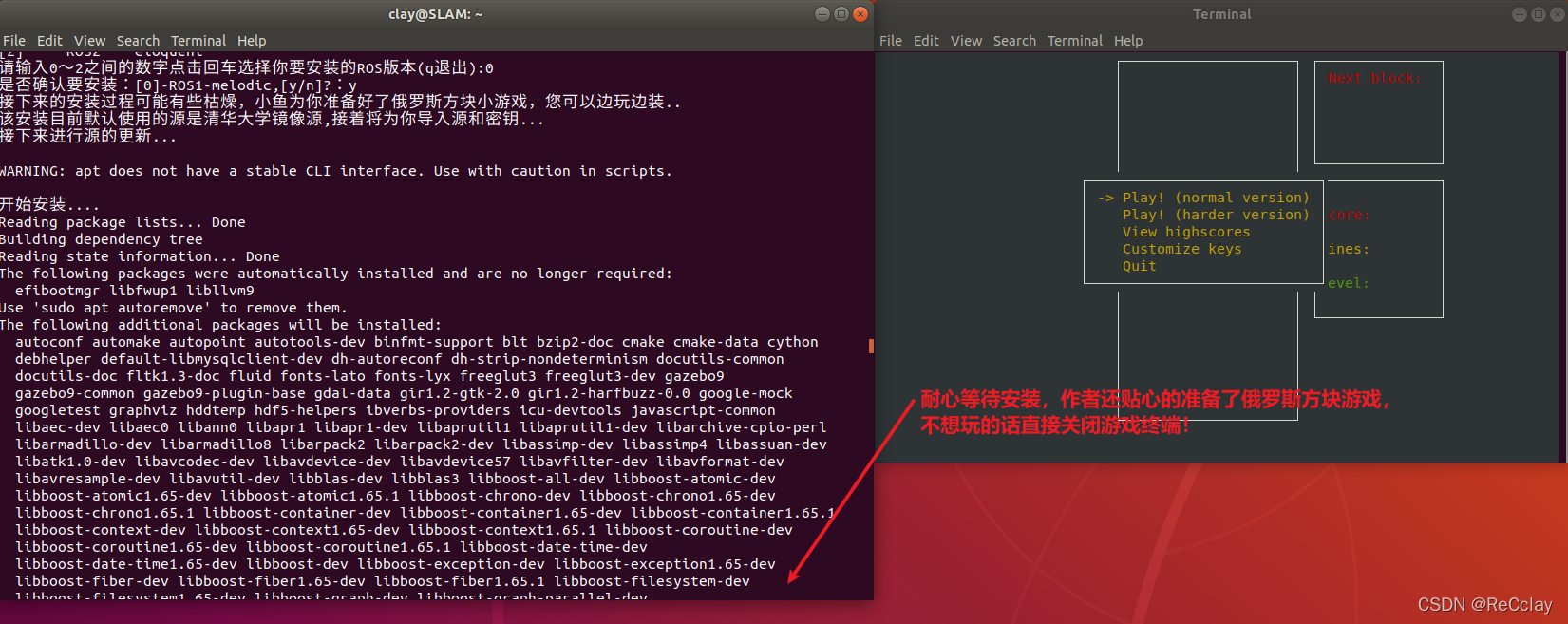
具体的安装过程不再文字赘述,“鱼香ros”大佬已经做了非常友好的人机交互,所以这里就直接放图了。
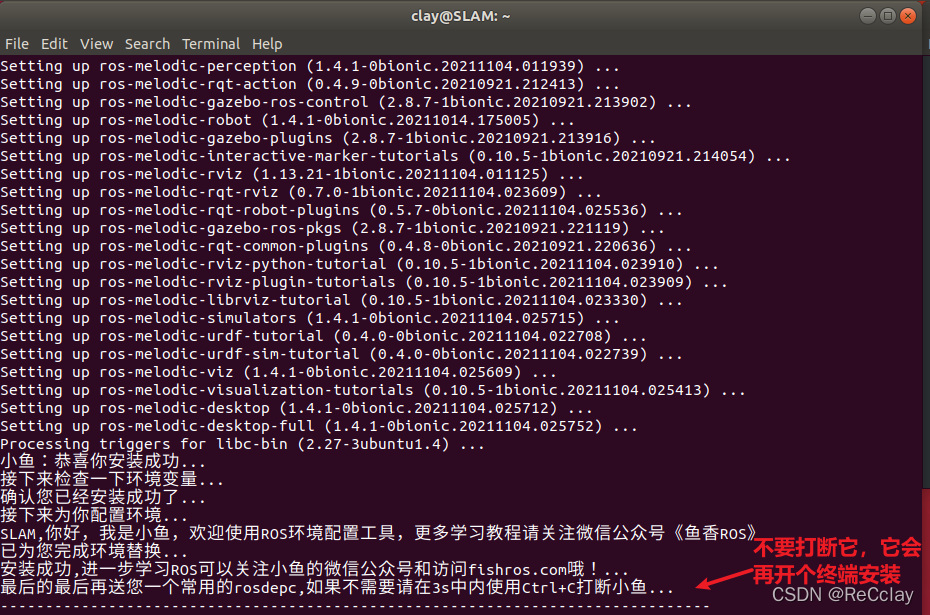
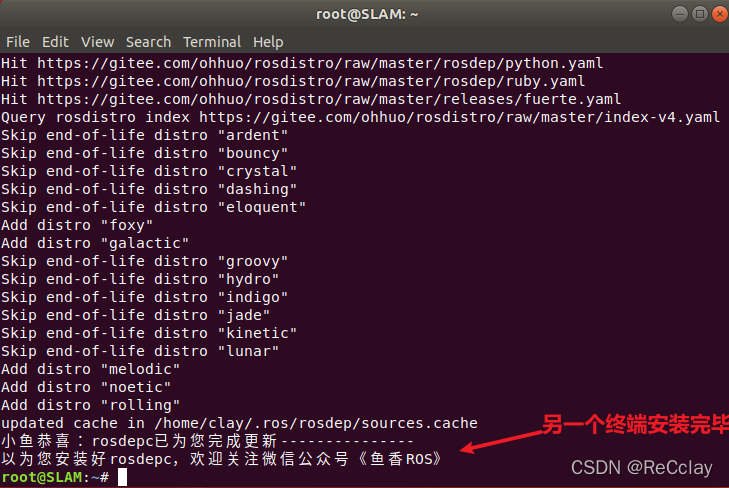
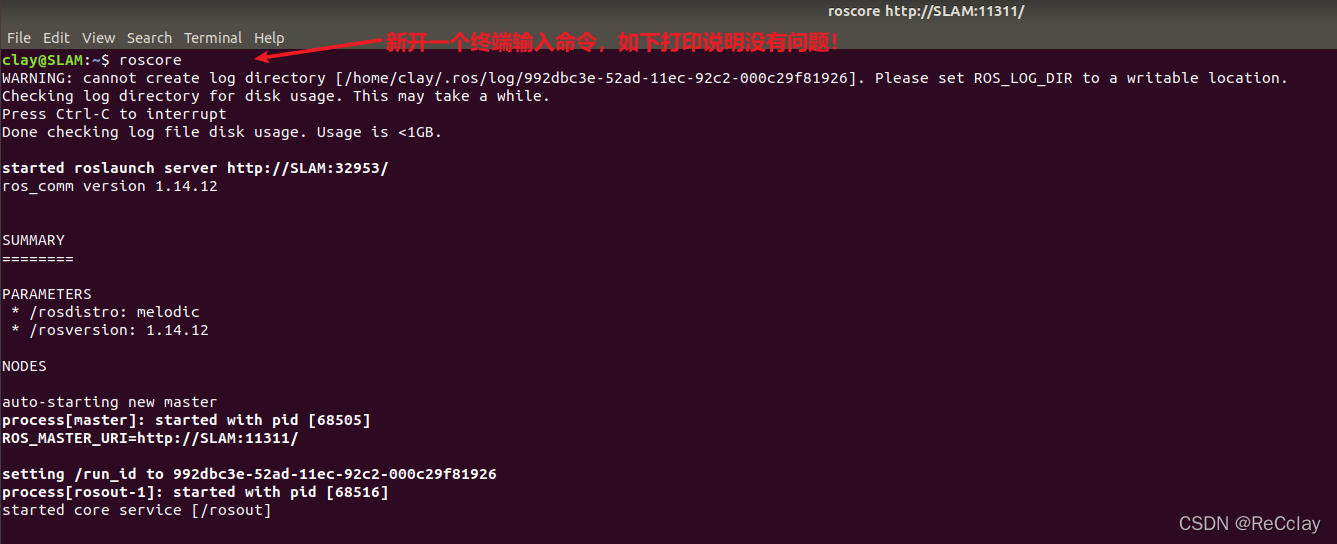
需要注意:安装完成后需要重新开一个终端环境变量才会生效,所以这里需要使用Ctrl+Alt+T打开一个新的终端,输入roscore如果有下图所示打印这说明安装成功!
五、作业:运行第一个ROS实例(小海龟实例)
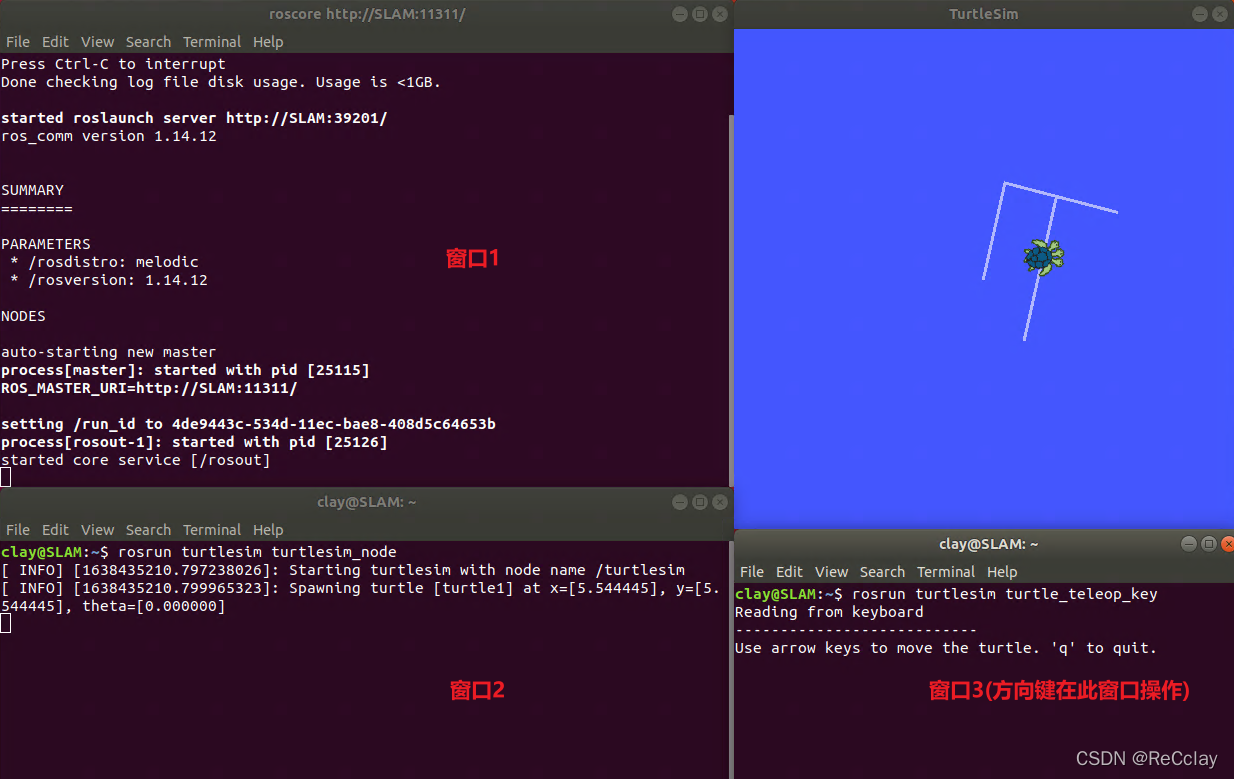
开启三个终端分别运行如下三条命令:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
将鼠标停留在最后一条命令对应的终端,即可通过方向键控制小海龟移动,如下图所示:
参考
PPT参考链接:
- https://www.science.org/journal/scirobotics
- http://wiki.ros.org/melodic/Installation/Ubuntu
- http://wiki.ros.org/ROS/Tutorials
- “Powering the world’s robots” 的ROS是什么?
- ROS Turns 10!
- Powering the world’s robots—10 years of ROS
- 历届ROSCon演讲视频和PPT
安装ROS参考链接:




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











