 转向侧倾控制模块开发与仿真
转向侧倾控制模块开发与仿真





 本文探讨了半主动悬架的软件架构,重点介绍了侧倾控制策略的开发,通过Carsim进行联合仿真,分析了不同电流下的侧倾性能。文章强调了悬架调教不仅关注性能数据,还需考虑驾驶舒适度,采用查表方式实现渐进控制。最后展示了转向侧倾工况的仿真对比结果,表明控制模块达到了预期效果。
本文探讨了半主动悬架的软件架构,重点介绍了侧倾控制策略的开发,通过Carsim进行联合仿真,分析了不同电流下的侧倾性能。文章强调了悬架调教不仅关注性能数据,还需考虑驾驶舒适度,采用查表方式实现渐进控制。最后展示了转向侧倾工况的仿真对比结果,表明控制模块达到了预期效果。
一、软件架构及Carsim联合仿真框架
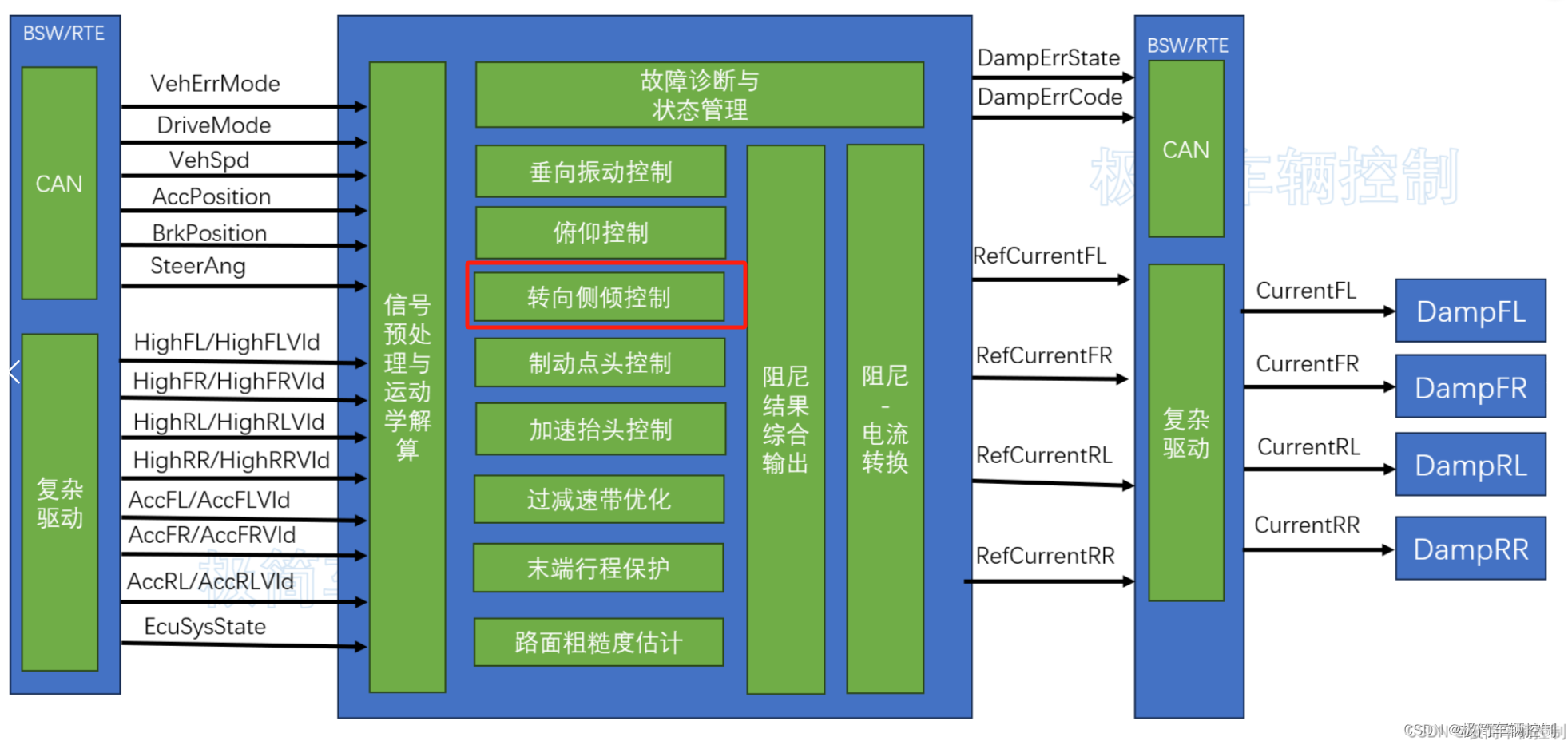
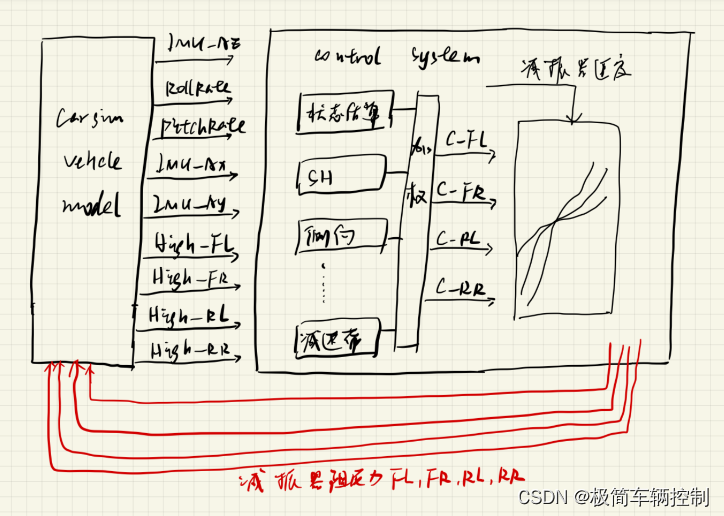
以上两图是半主动悬架控制软件架构与联合仿真架构;
二、侧倾控制策略
侧倾控制的套路与上一讲俯仰控制的套路差不多,前期单一模块开发,可以尝试根据某个指标进行查表,得到目标电流。
首先测试对比下最小电流与最大电流工况下,侧倾性能与原车被动减振器侧倾性能对比,性能指标为侧倾率。测试工况为DLC高速变道。
测试结果如下:
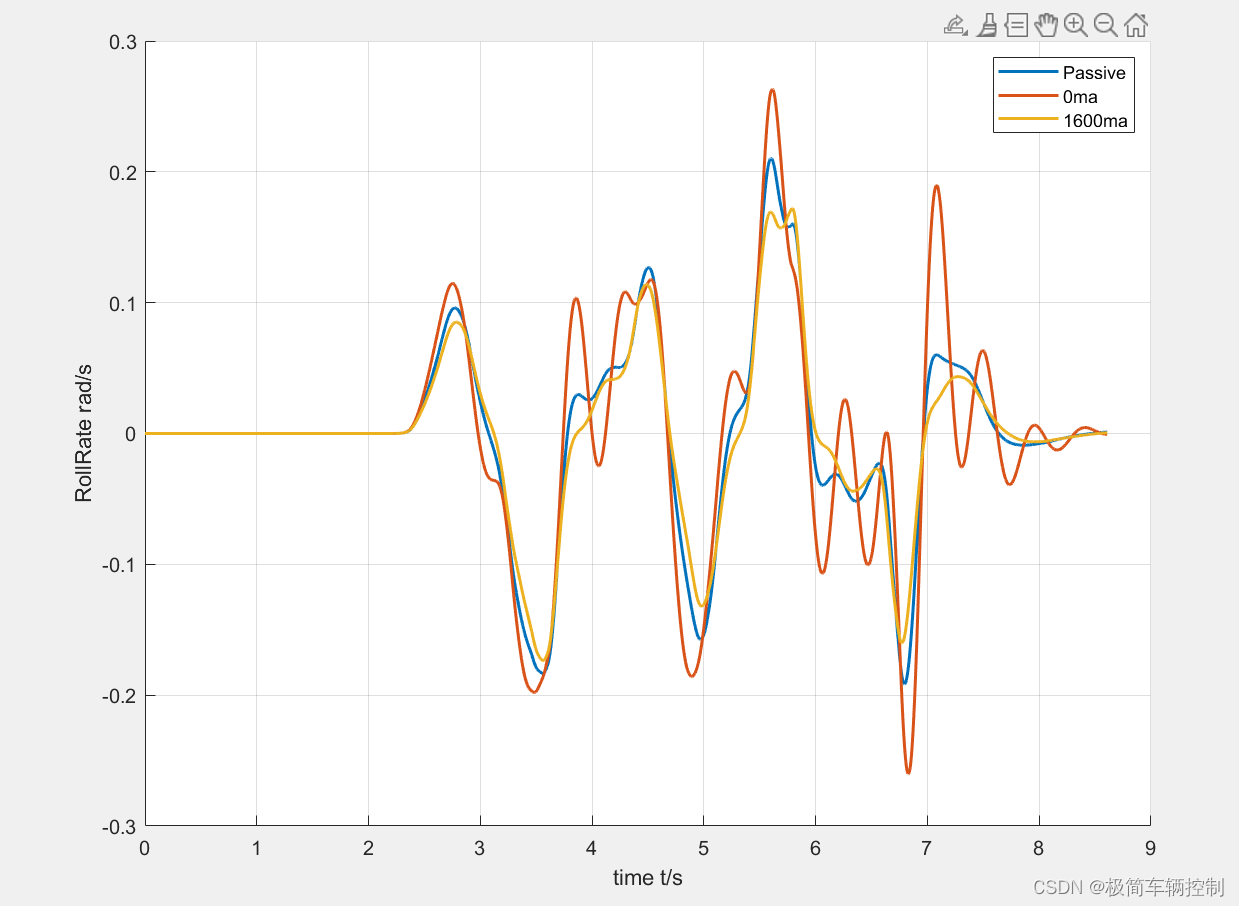
同车速、同样转弯动作,侧倾性能依次为1600ma>Passive>0ma,这也很好理解,我们设定的cdc阻尼力,同等拉压速率下,电流越大,阻尼力越大,也即减振器越硬,相应的对车身支撑越好,对侧倾车体姿态变化抑制的效果也就越好。
那能否一有侧倾就直接最大电流直接拉满?那也不行。悬架调教并不止关注纸面数据好不好看,还关注驾乘体验。最大电流直接拉满会让车辆姿态变化很不柔顺,很不线性,很突兀,所以正常情况下很少这么做,一般会有个渐变的过程。
这里还是用查表方式,依据侧向加速度,查表得到目标电流。

红框部分为死区。
三、转向侧倾工况仿真对比
仿真对比效果如下:
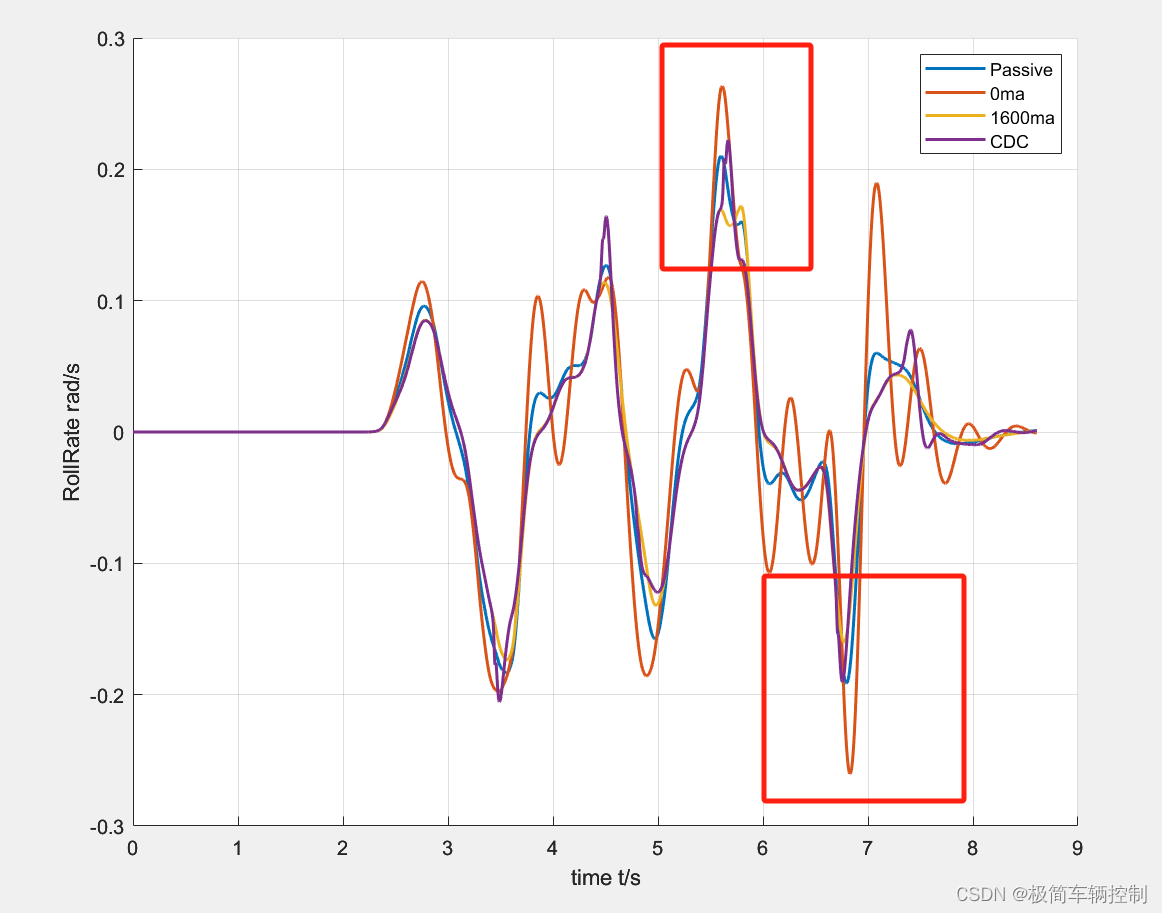
初步开发的侧倾控制模块有取得预期的控制效果,侧倾率有降低。


















 1091
1091




 到【灌水乐园】发言
到【灌水乐园】发言









