




书接上文
全网最全线控转向仿真,基于Carsim的线控转向仿真基础版_齿条力估计 卡尔曼滤波-优快云博客
在上一篇基础版的博客中,手感模拟部分我们缺少了回正补偿,依靠齿条力中轮胎回正力分量,可以回正一部分,但是无法确保方向盘回到中间位置上,因此需要加入一定回正补偿。此外,还缺少线控转向独有的可变转向比功能的仿真,周末抽空将这两块给补上。
一、回正补偿
合理设置自动回正补偿力矩,补偿力矩大小与方向盘转角,车速相关。
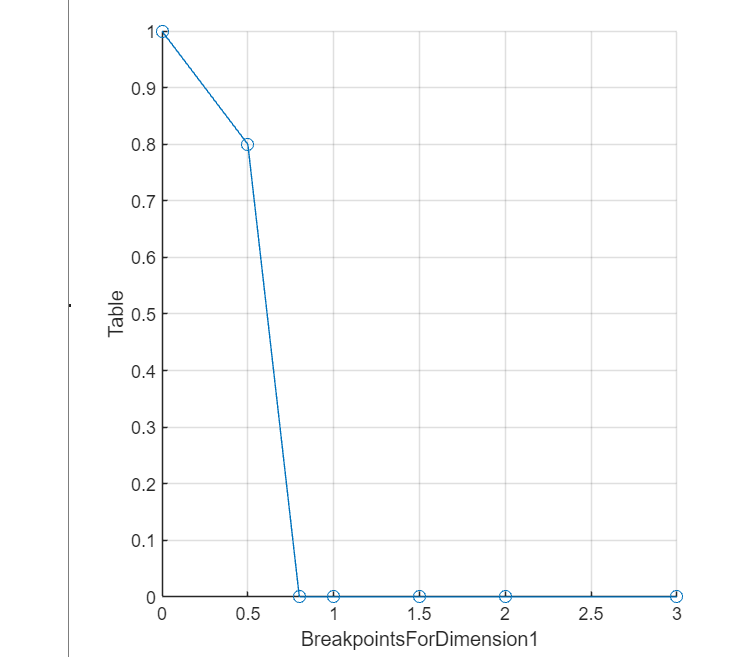
此外,为了避免回正补偿干扰正常手感,应确保驾驶员有操作方向盘时,切断回正补偿的输出。
这里,通过设置回正增益表来解决。
回正补偿效果:
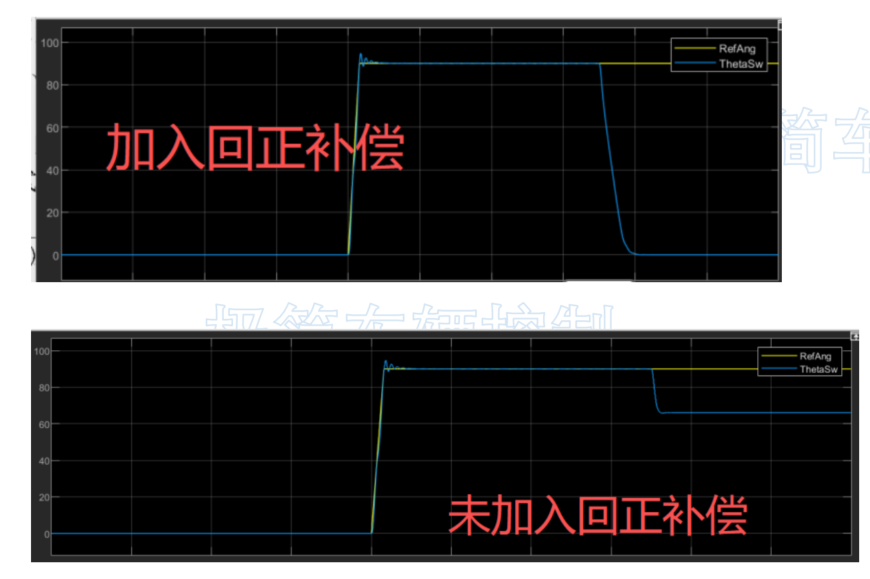
如图所示,未加入回正补偿时,方向盘角度离中位0角度还有很大距离,加入回正补偿后,角度丝滑回到中位。
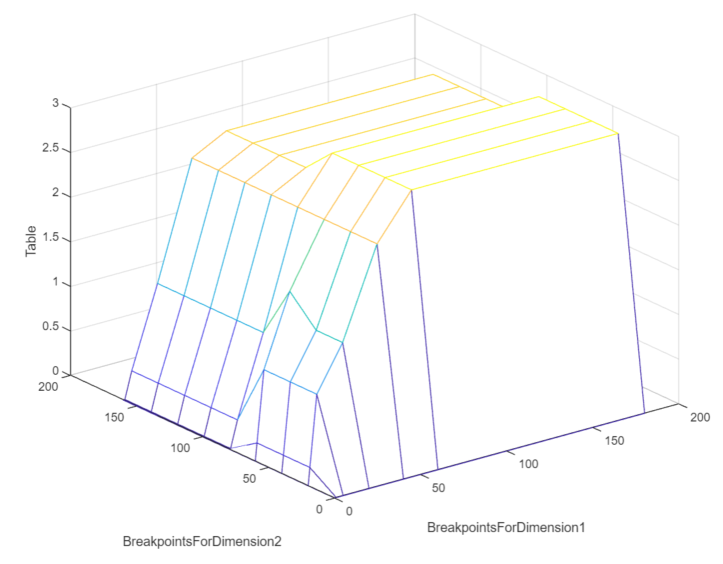
二、可变传动比
可变传动比要实现的目标是:
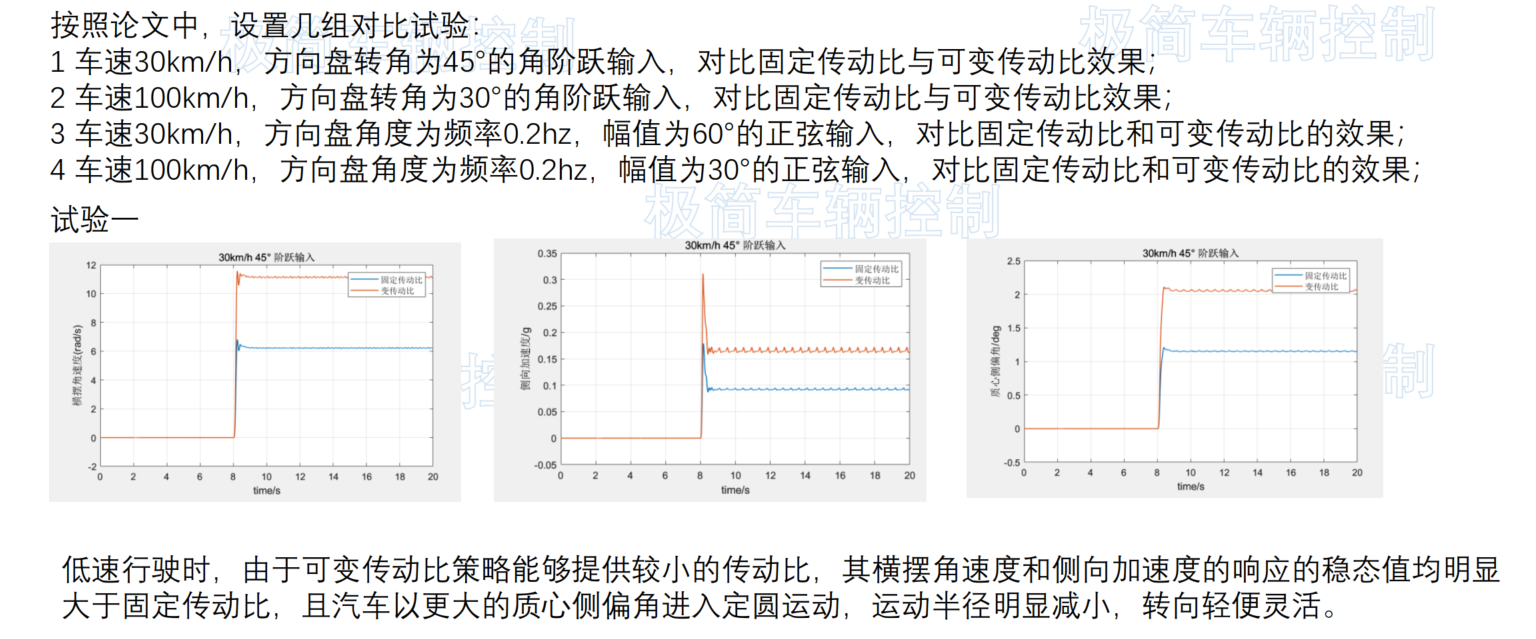
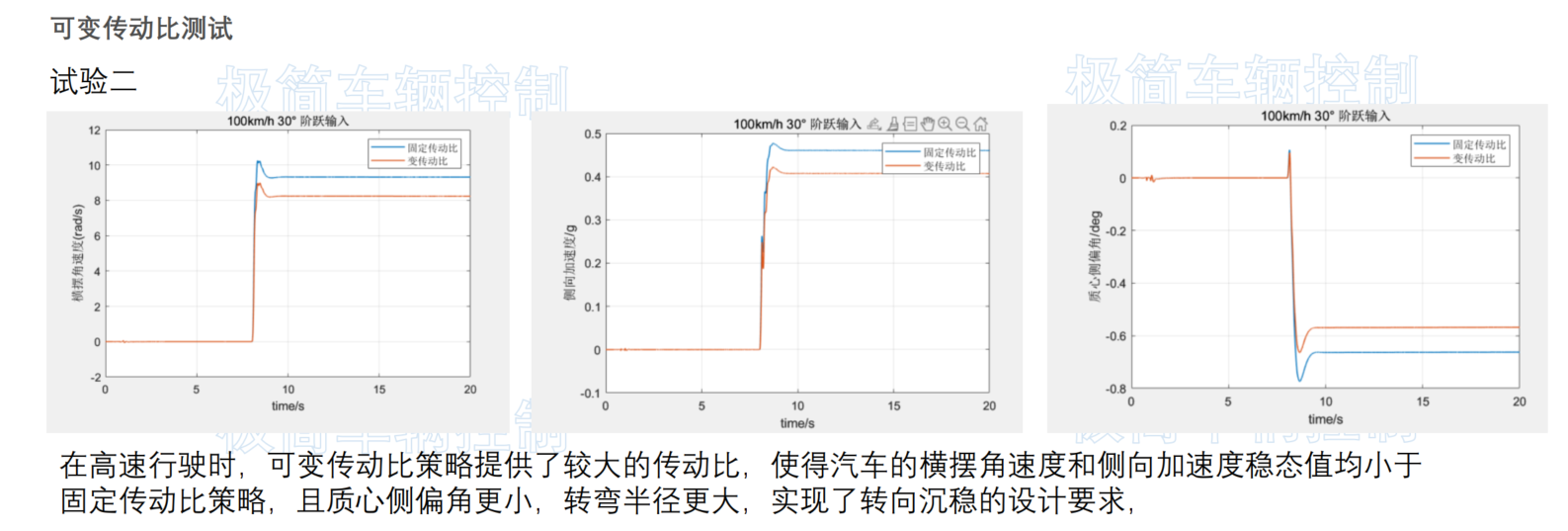
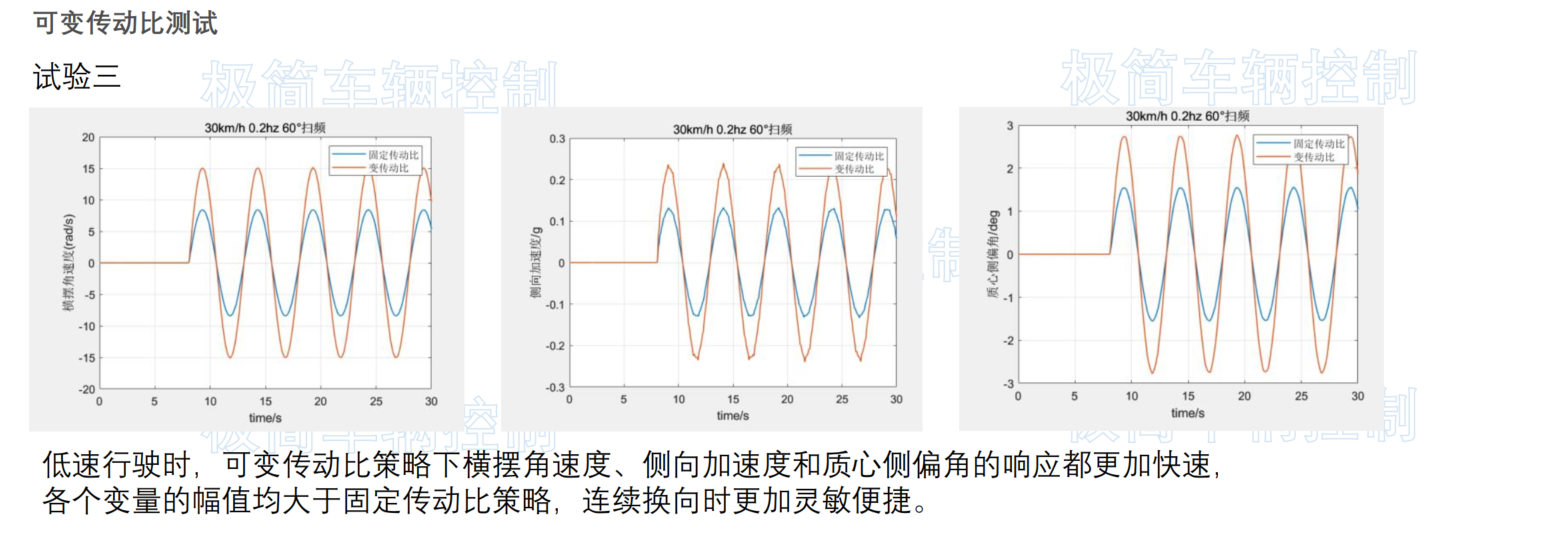
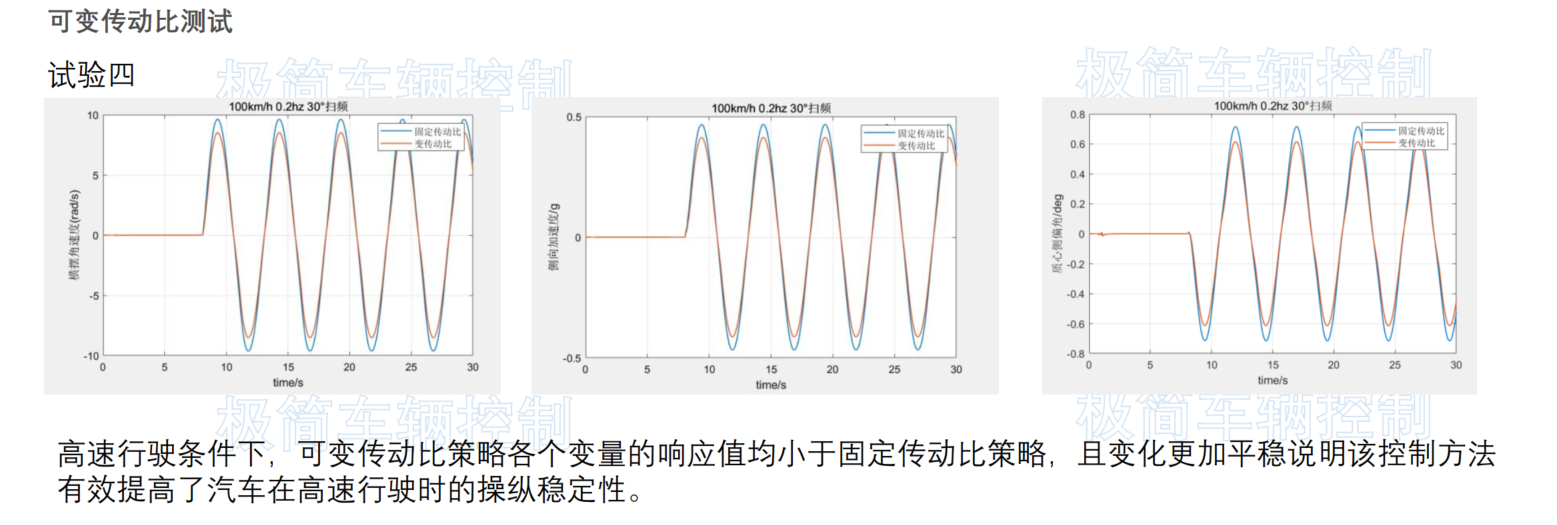
车辆在低速时,给小传动比,同样的方向盘转角下,输出较大车轮转角,实现低速转向灵活,转向半径小的特点。车辆在高速时,输出大传动比,同样的方向盘转角下,输出较小车轮转角,实现高速转向沉稳的特点。
可变传动比策略逻辑主要参考以下这篇一汽的论文:
仿真效果:
三 模型源码
需要源文件仿真模型的同学们,还是在某宝店铺<极简车辆控制>中寻找。
包含以下文件:

已经购买过的同学,已经包含了此次升级内容。


















 2971
2971

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











