




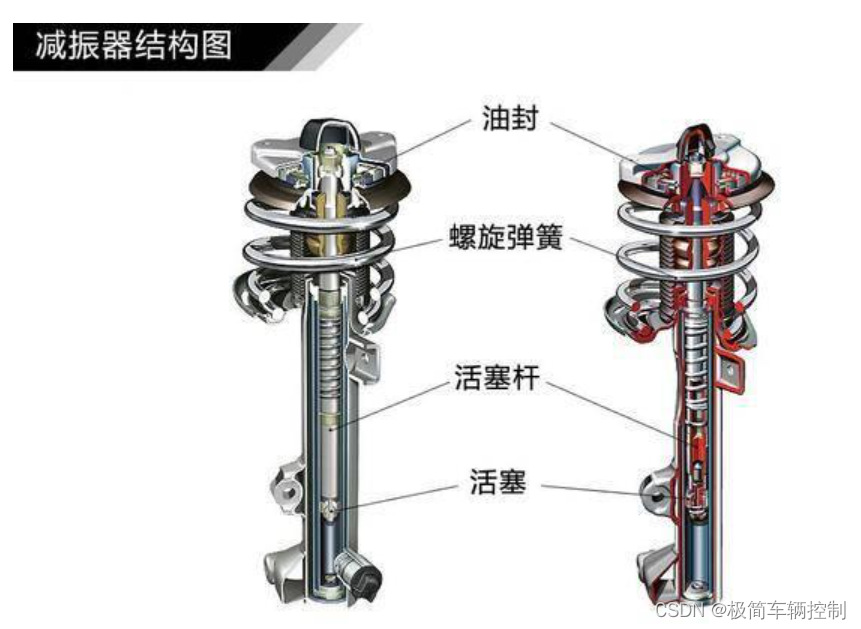
1、结构上:
传统减振器:传统减振器内部活塞垫片组合是唯一,调教过程中调教工程师可以通过调整活塞、垫片进而改变孔径大小,进而改变阻尼曲线,得到不一样的力学效果。
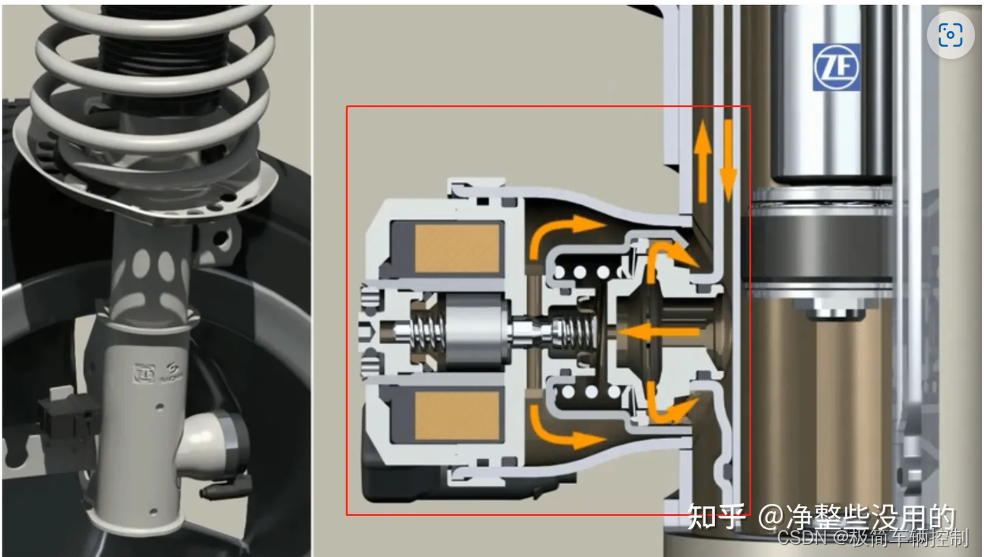
CDC的结构如下图所示: 红框部分是CDC减振器关键所在,电磁阀。ECU根据一系列算法产生目标电流,电流通过线圈后产生电磁感应驱动电磁阀,从而改变阀孔的大小,也就改变了油液通过阀的阻力,也就改变减振器的阻尼系数。
CDC机械结构的制造难点在于阀的设计和加工,属于精密加工,一直是国内工厂的短板。
MRC的结构如下图所示,减振器内灌有特俗的液体,不通电的情况下,磁流变液粘性小,减振器阻尼小,通电的情况下,磁流变液粘性大,减振器阻尼则大,电流不同则阻力不同。
制造难点应该是磁流变液的配方了吧。

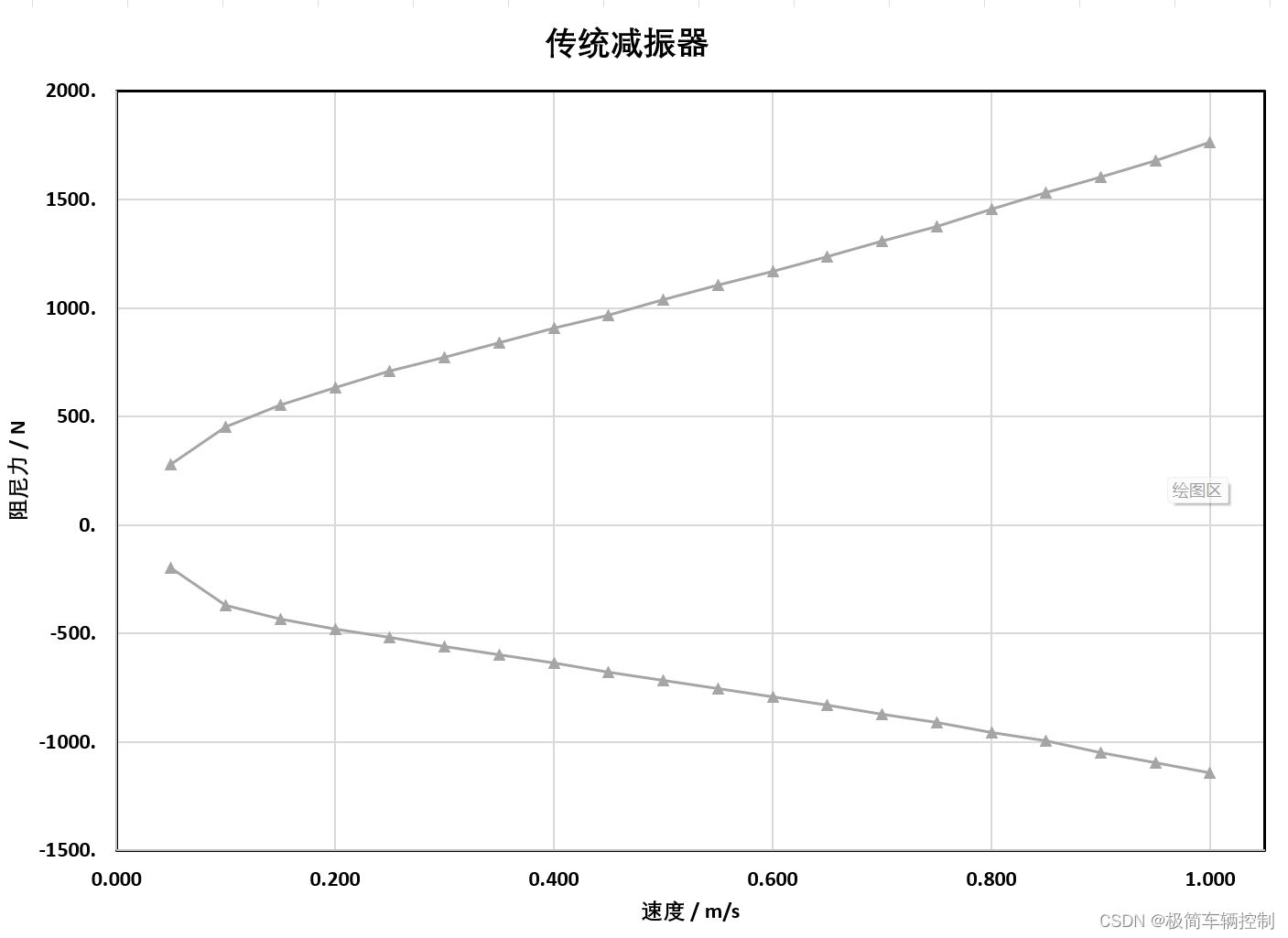
2、力特性方面:
传统减振器的示功曲线如下所示: 在整个车辆的生命周期,抛开性能衰退的因素,曲线是唯一的。
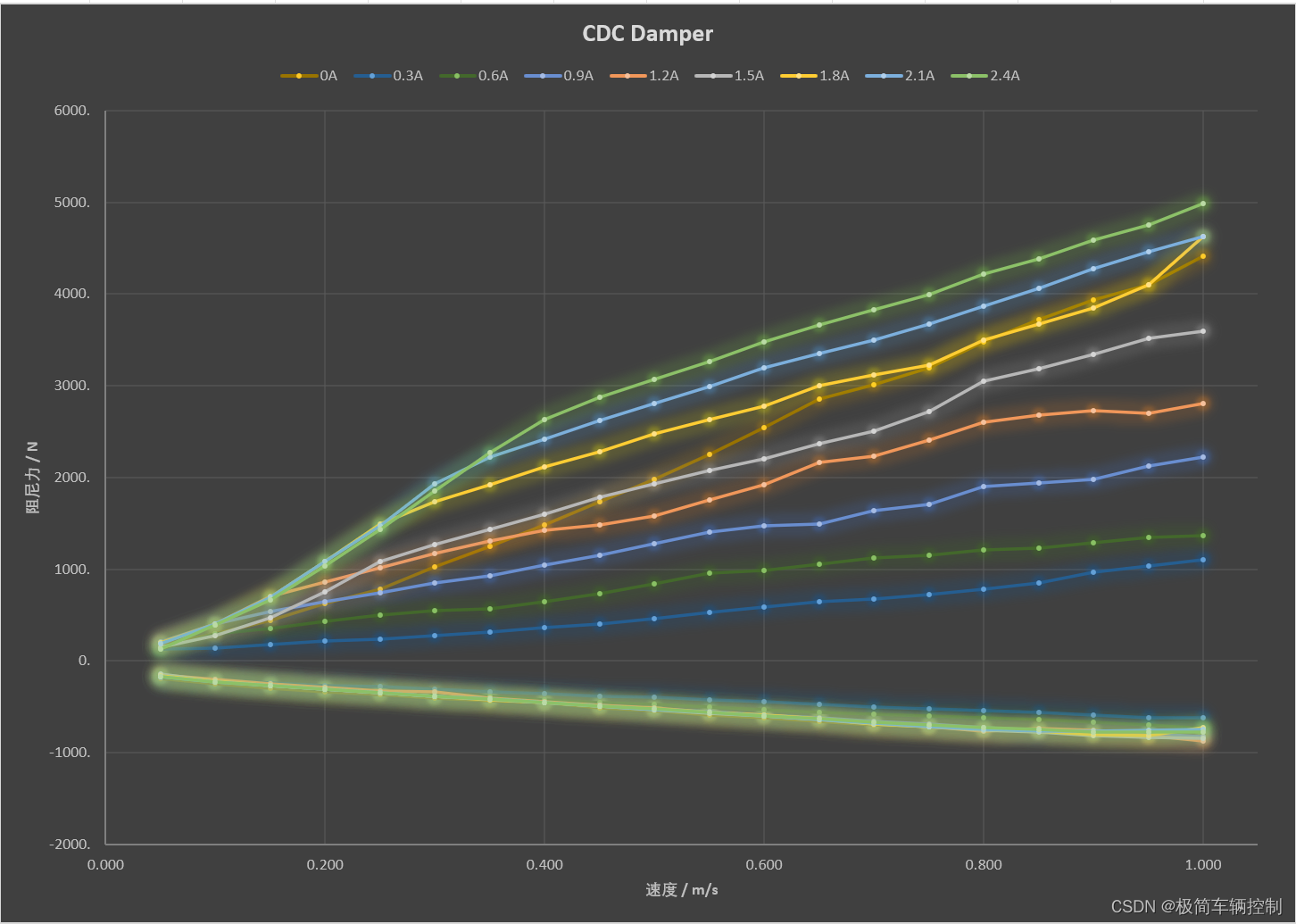
而CDC的曲线如下图所示:
磁流变减振器的示功曲线,手头上没有,就用参考教材仿真图代替下:
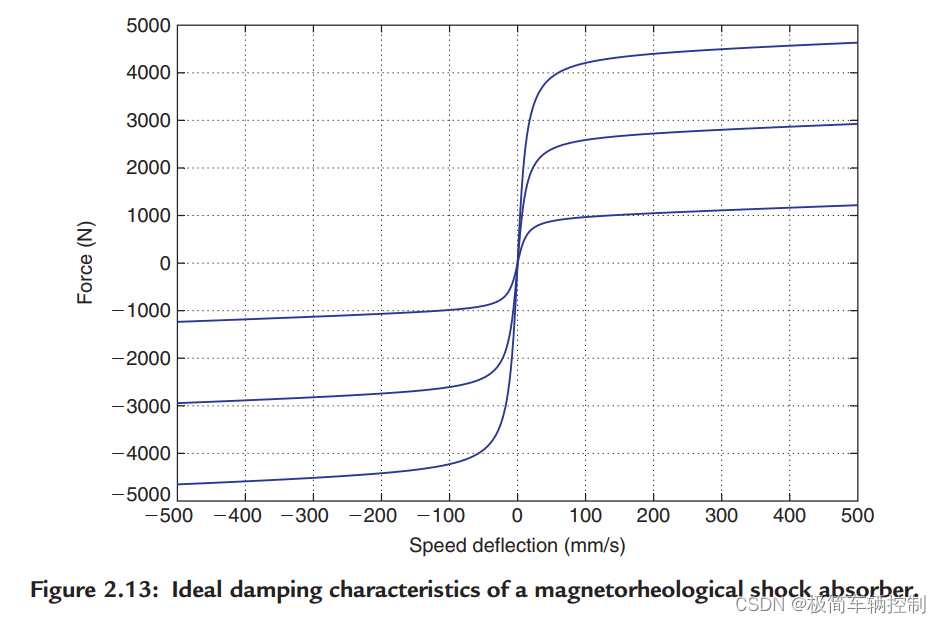
通过对比可以发现两张曲线的差别:
减振器压缩速度-0.2m/s到+0.2m/s这段范围我们称为操控区间,行车过程种中的加速制动、大方向转弯,减振器压缩速度基本在这个区间内。对比CDC和磁流变减振器的曲线我们可以发现,在这个区间内,磁流变减振器力的建立速度比CDC力的建立速度会快非常多。这个特点也决定了在加速后蹲、制动点头、转弯侧倾等操控性能方面,磁流变减振器要明显强于CDC。
3、控制带宽
理论上磁流变减振器响应速度是1ms/s左右,CDC是10ms/s。电控悬架的控制的闭环回路如下图所示:
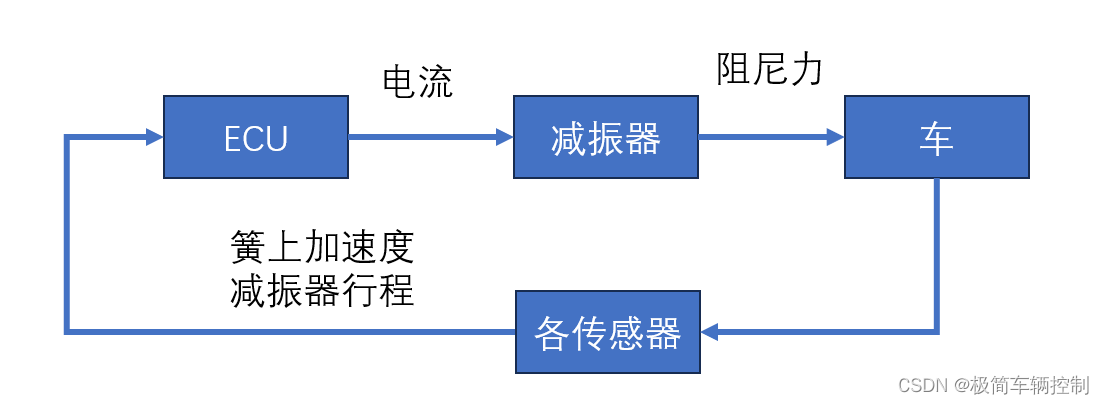
从ECU获取簧上加速度,减振器行程等信息,实时计算,再产生实际电流作用到减振器上,这个过程在10ms以内,再加上传感器采集等延迟,估计磁流变的实际控制周期为15ms,CDC的实际控制周期为30ms。就垂向平顺性而言,人体能感受到的是20hz以内的振动,无论磁流变还是CDC,两者都能提高平顺性,平顺性的差别应该不大。但是对于车身姿态的控制,这15ms的差距可能影响挺大。这方面答主没机会实车对比过,要是哪位大佬有比较过,评论区分享下。
4、控制算法
与同行交流过,控制算法方面两者大同小异,基本上可以直接复用,文中贴的那本书里也有讲了几种经典算法。
优缺点:
CDC:优点是便宜,技术较成熟稳定了。缺点是可调上限没有磁流变高。
磁流变:优点是可调上限高,稳,性能优越。缺点是贵,技术相对CDC没那么成熟。


















 2019
2019

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











