




 本文探讨了半主动悬架与Carsim的联合仿真方法,涉及CDC减振器的建模、模拟器接口配置、天棚控制算法的应用以及仿真对比,结果显示天棚算法在衰减车身共振上有显著优势,但需进一步调参优化防止多余振动。
本文探讨了半主动悬架与Carsim的联合仿真方法,涉及CDC减振器的建模、模拟器接口配置、天棚控制算法的应用以及仿真对比,结果显示天棚算法在衰减车身共振上有显著优势,但需进一步调参优化防止多余振动。
一、半主动悬架与Carsim联合仿真框架

整个cdc-carsim仿真工程框架大致如上图所示,carsim提供整车模型,实时输出加速度,角速度等传感器信号;simulink模型根据传感器信号的数据,各个控制模块依次计算需求电流。
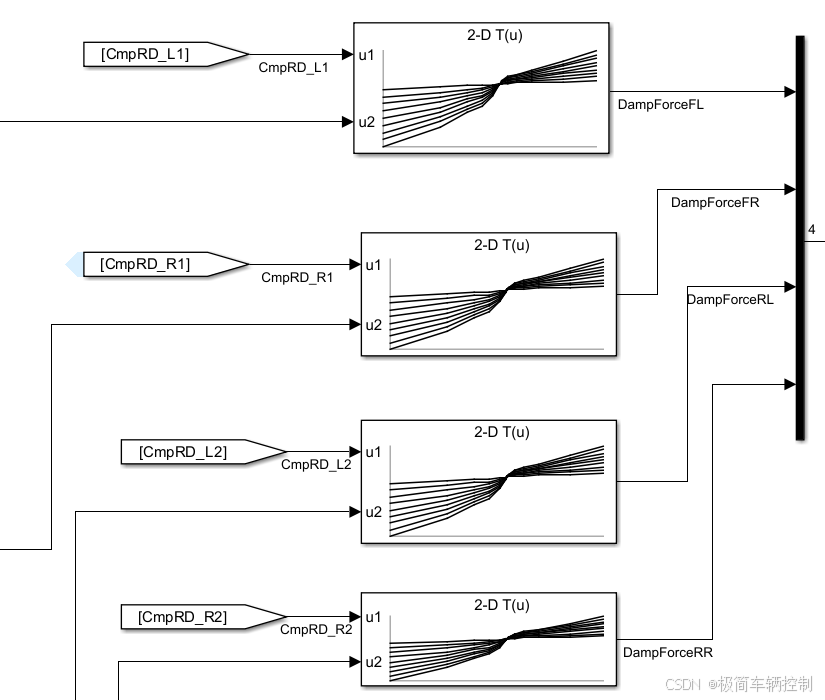
由于carsim车辆模型没有带cdc减振器,只提供了减振器阻尼力的接口,因此,在各个模块加权计算出需求电流后,仿真模型多一步查表,查出阻尼力,再反馈回给carsim。
二、减振器力曲线
由于手里没有实际CDC示功曲线,我们这里尽可能接近的造一个。
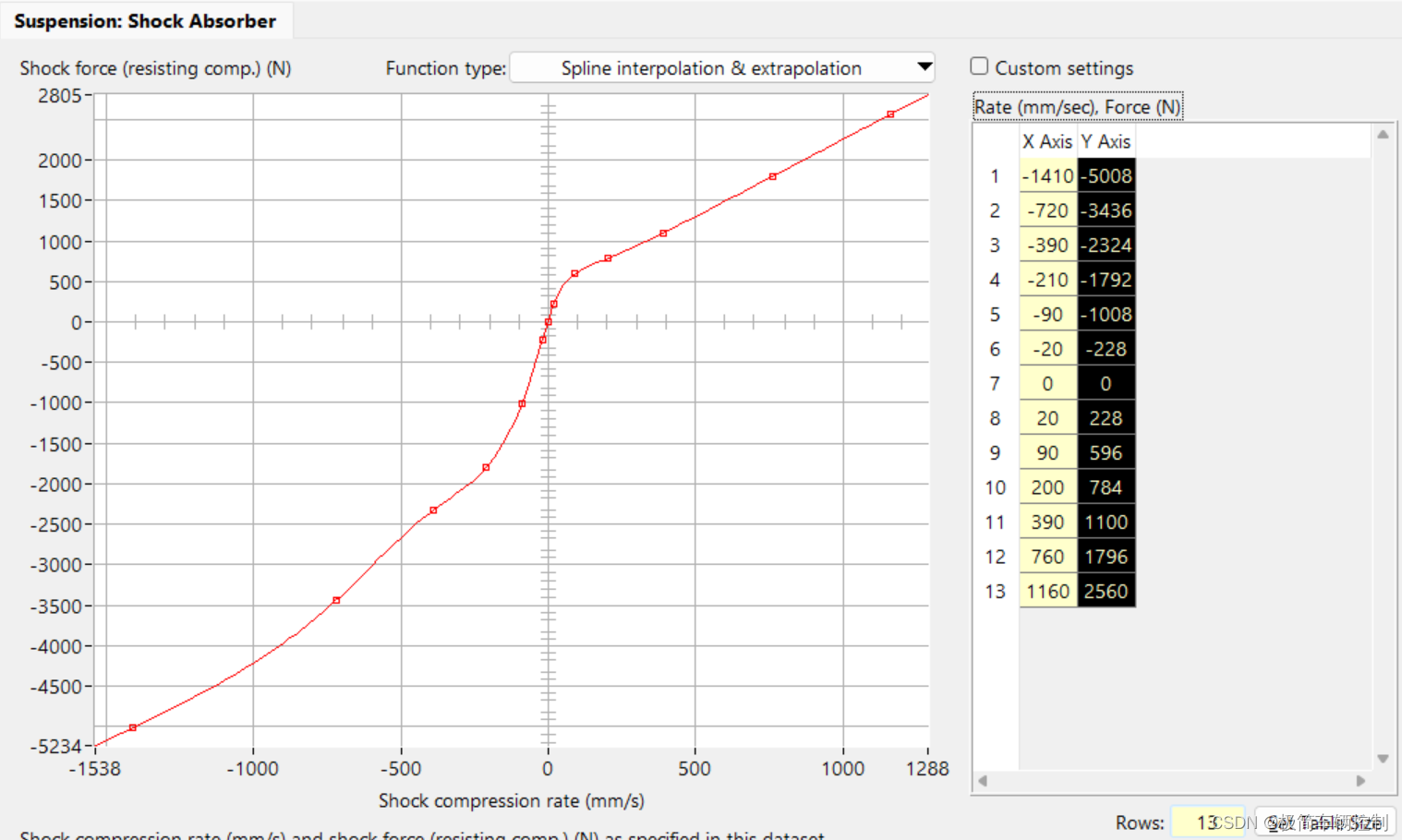
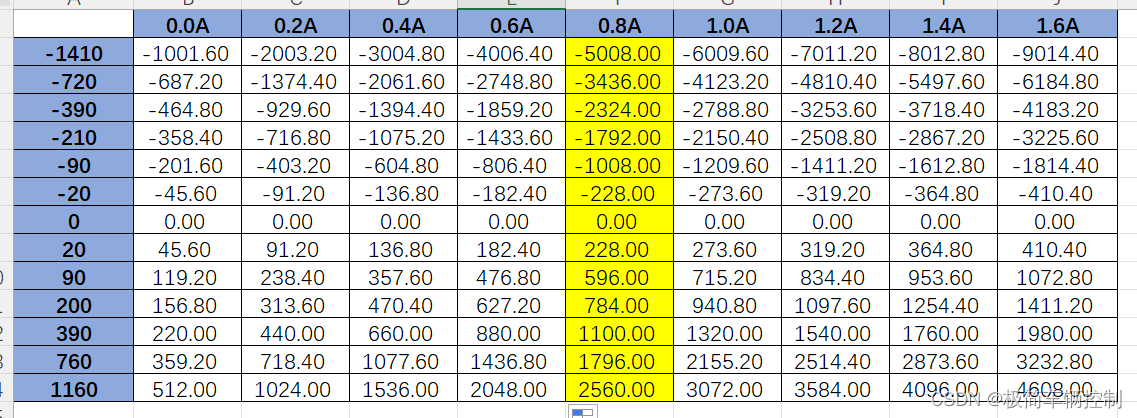
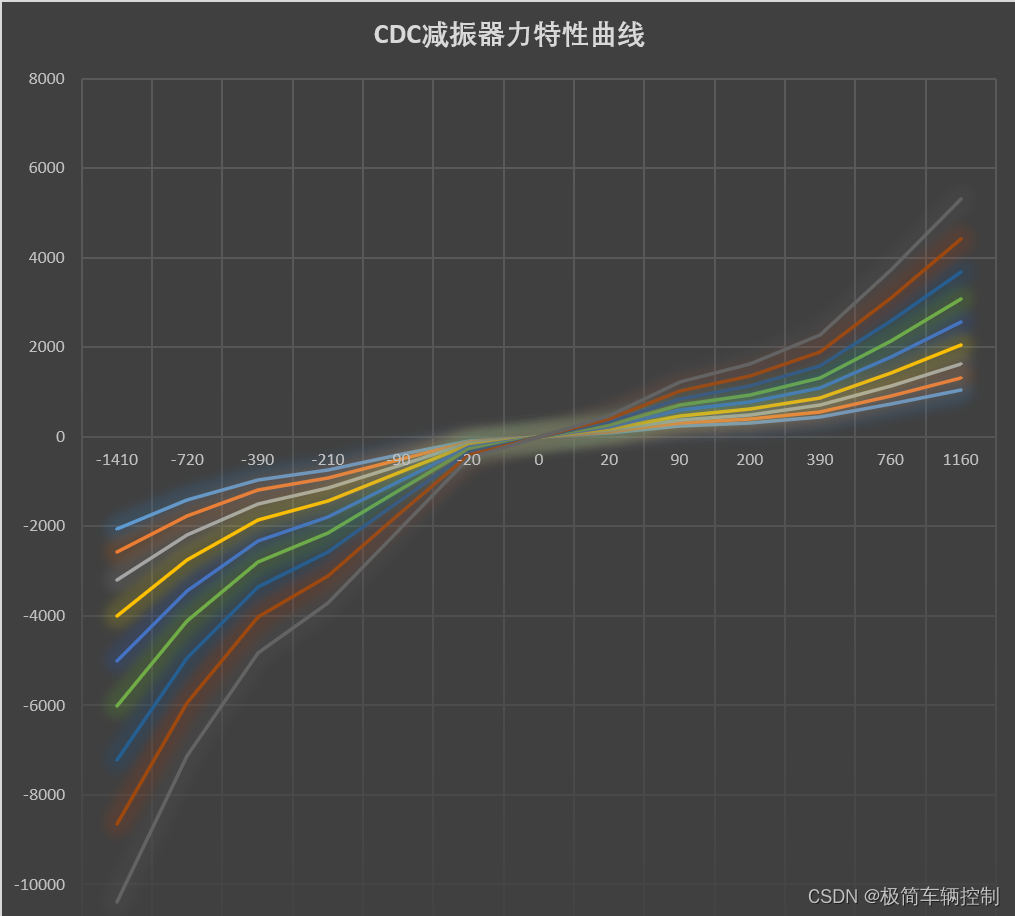
以上图carsim中减振器曲线作为中间电流如(0.8A)时的CDC力特性曲线,两边的再按照一定比例增减。数据和曲线图如下所示:
三、配置carsim与simulink的接口
Carsim输出,Simulink输入
| 名称 | 含义 | 单位 |
| Az_SM | 车身质心垂向加速度 | g |
| Ax_SM | 车身质心纵向加速度 | g |
| Ay_SM | 车身质心侧向加速度 | g |
| AVx | 车身质心侧倾率 | deg/s |
| Avy | 车身质心俯仰率 | deg/s |
| CmpRD_L1 | 左前减振器压缩速率 | mm/s |
| CmpRD_L2 | 左后减振器压缩速率 | mm/s |
| CmpRD_R1 | 右前减振器压缩速率 | mm/s |
| CmpRD_R2 | 右后减振器压缩速率 | mm/s |
| Az_S2 | 左前车身垂向加速度 | g |
| Az_S3 | 右前车身垂向加速度 | g |
| Az_S4 | 左后车身垂向加速度 | g |
| Az_S3 | 右后车身垂向加速度 | g |
Carsim输入,Simulink输出
| 名称 | 含义 | 单位 |
| IMP_FD_L1 | 左前减振器阻尼力 | N |
| IMP_FD_L2 | 左后减振器阻尼力 | N |
| IMP_FD_R1 | 右前减振器阻尼力 | N |
| IMP_FD_R2 | 右后减振器阻尼力 | N |
四、搭建垂向SH控制模型
在上述这篇文章中,连续天棚计算公式如下:

这里C是指阻尼系数,阻尼系数可以看做是电流,电流越大,阻尼系数越大,反之电流越小,阻尼系数越小。依据这个公式,搭建天棚控制模型,依次计算得到四根减振器的需求电流。
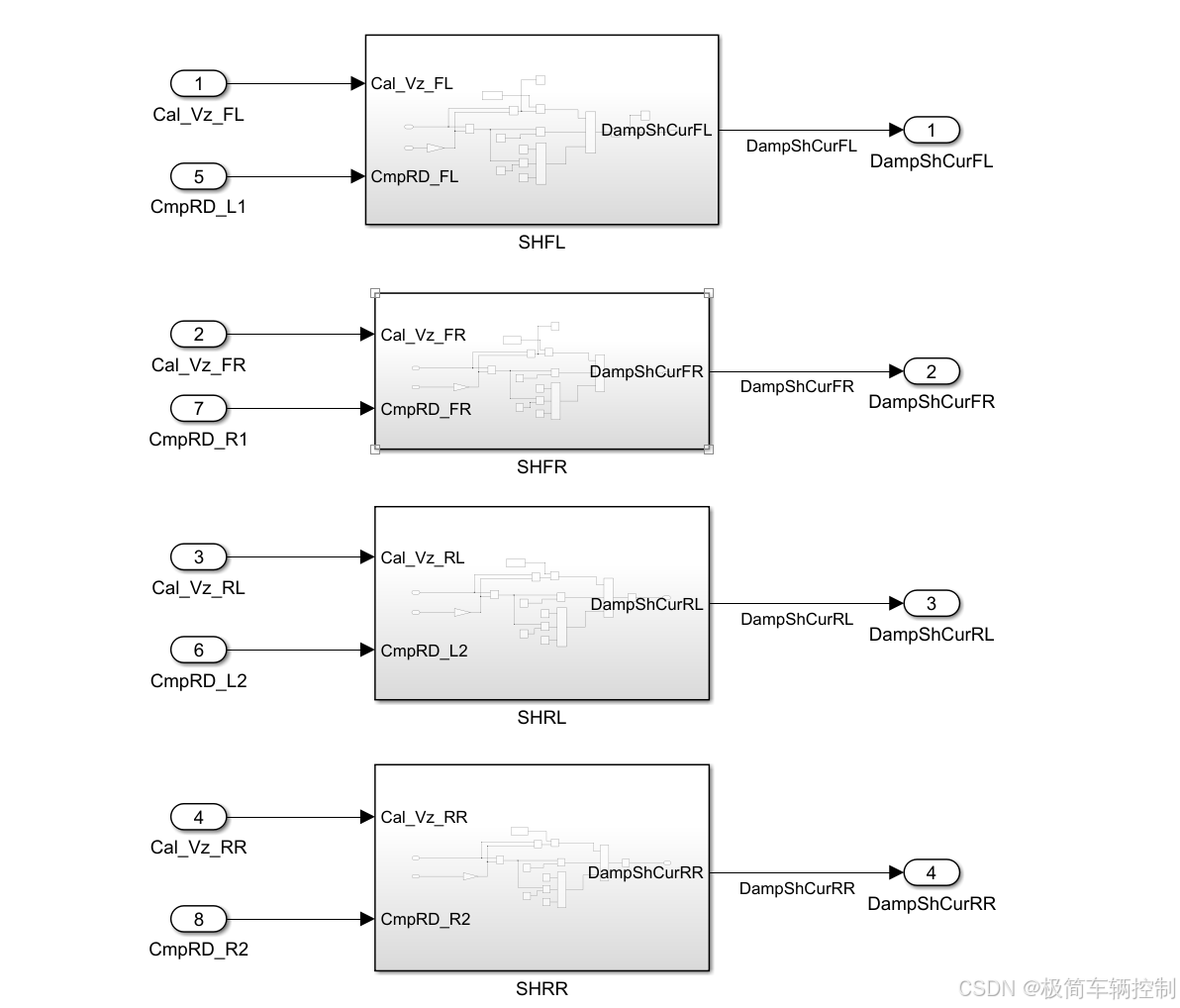
需求电流再与减振器速度一起通过力--速曲线一起查表,便得到了减振器力,这个力输出到carsim,作用到carsim的车上。
五、仿真对比
这边随便调了一组参数,以36km/h车速经过c级路面,车辆质心加速度对比
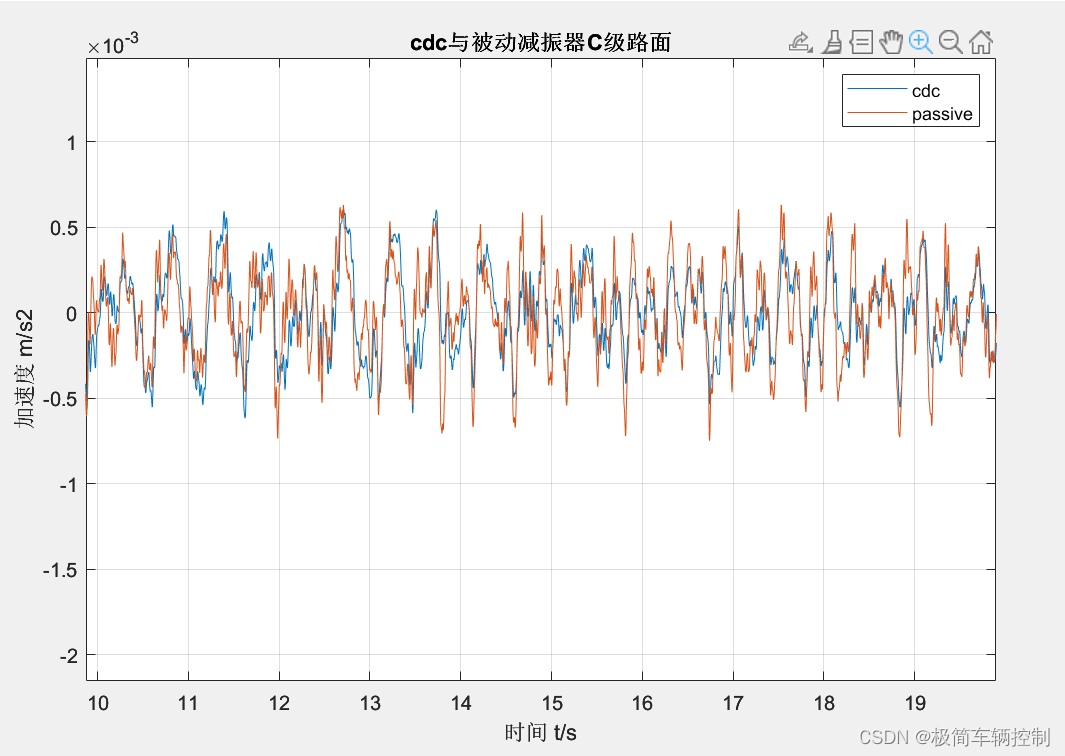
均方根值对比提升 19.33%
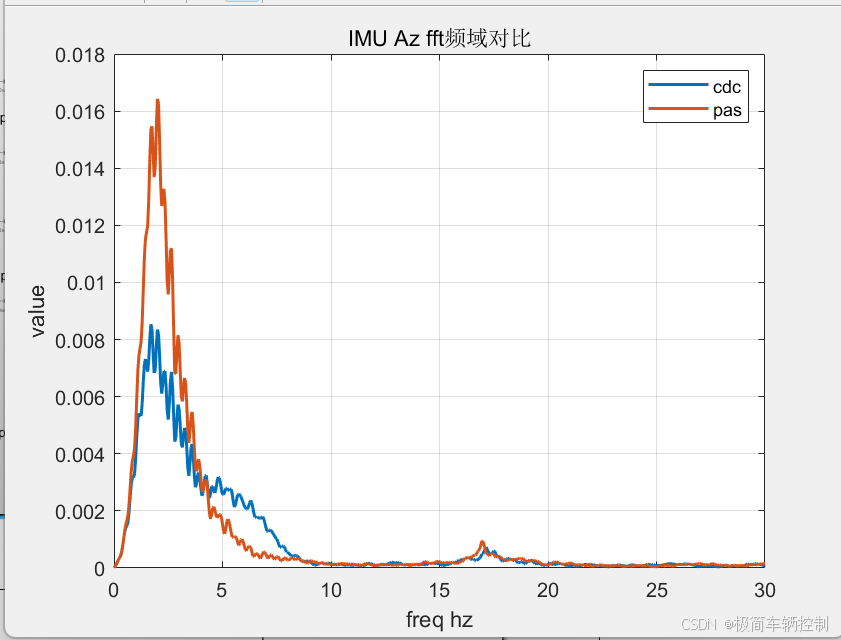
在衰减车身共振频率方面,天棚算法与被动减振器比起具有很大优势,提升明显。但是同时在5到10hz之间引入了多余振动。后续再进行细致调参,如果仍解决不了此问题,考虑加入Add算法。




















 1975
1975





 到【灌水乐园】发言
到【灌水乐园】发言









