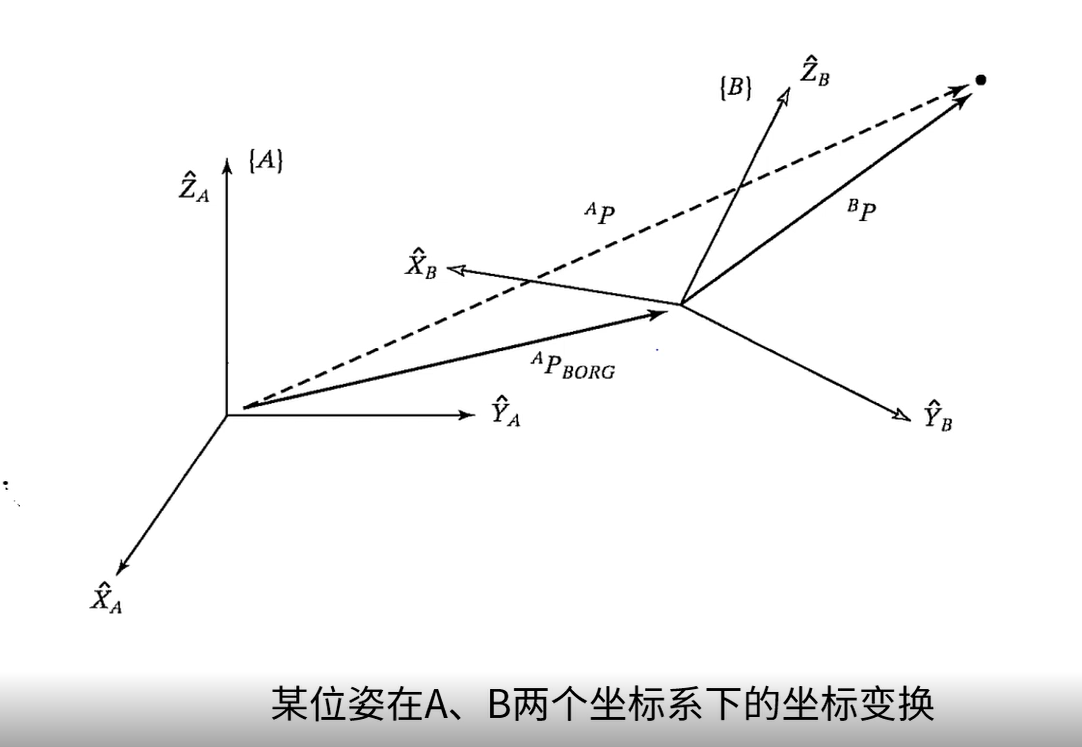
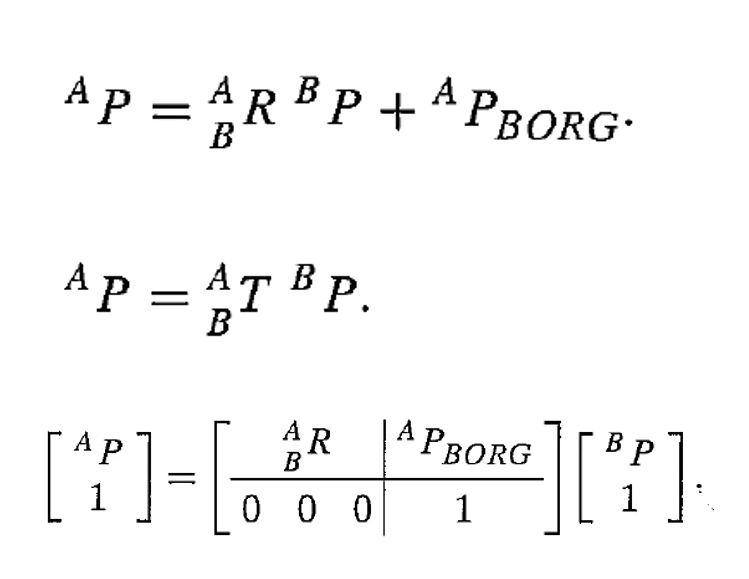
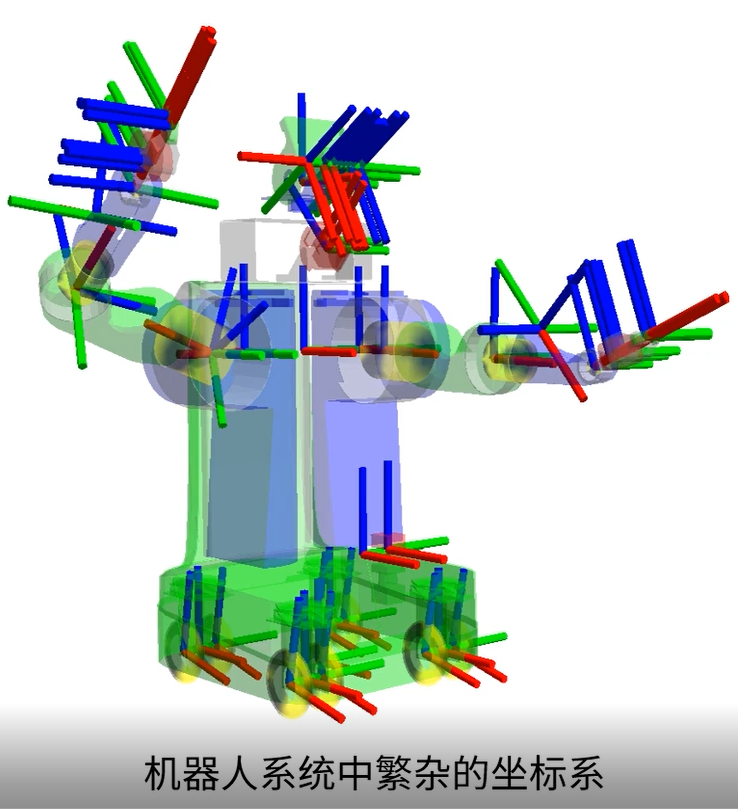
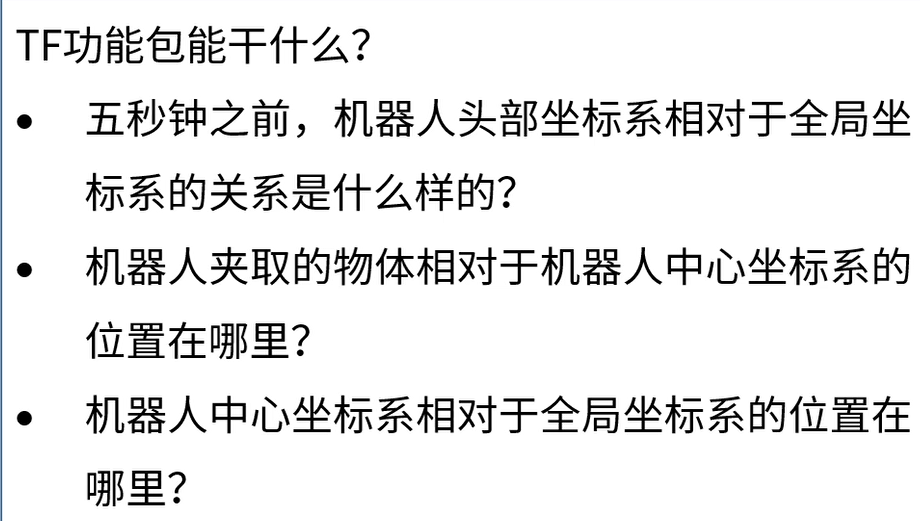
【古月居ROS21讲】.17 ROS中的坐标系管理系统 坐标变换 机器人中的坐标变化 TF功能包能干什么? TF坐标变换如何实现? TF机器人中的坐标变换 实际的海龟案例 实现原理 动态描述 可视化工具 坐标变换 参考书籍《机器人学导论》 机器人学导论都会用两章的章节来描述平移的变换和旋转 来变化 在ros当中这个理论相当的重要 ,相当的基础 机器人中的坐标变化 机器人摄像头坐标系和底盘坐标系关系变化,在ros 中tf功能包可以通过功能包完成查询等操作 tf功能包具有时间属性,会保存10秒钟之内的所有坐标的变化 帮助我们去实现机器人中比较繁杂的功能和实现 TF的坐标系可以通过查询得到 TF功能包能干什么? TF坐标变换如何实现? TF机器人中的坐标变换 移动
 1065
906
2348
974
498
1940
1065
906
2348
974
498
1940






 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























 到【灌水乐园】发言
到【灌水乐园】发言








