




 本文介绍了如何在ROS中自定义消息与服务的步骤。包括srv文件的定义、package.xml和CMakeList.txt的配置、编译过程等关键环节。通过实例演示了具体的创建和服务调用流程。
本文介绍了如何在ROS中自定义消息与服务的步骤。包括srv文件的定义、package.xml和CMakeList.txt的配置、编译过程等关键环节。通过实例演示了具体的创建和服务调用流程。
服务数据的定义与使用
没更完 有时间再更新
自定义 message的协议
怎么去自定义一个数据的服务结构
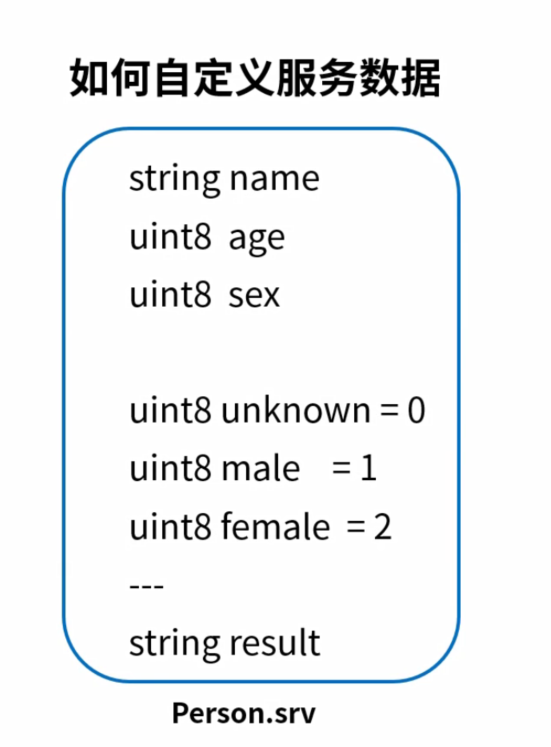
其中可以看到有 — 作为区分
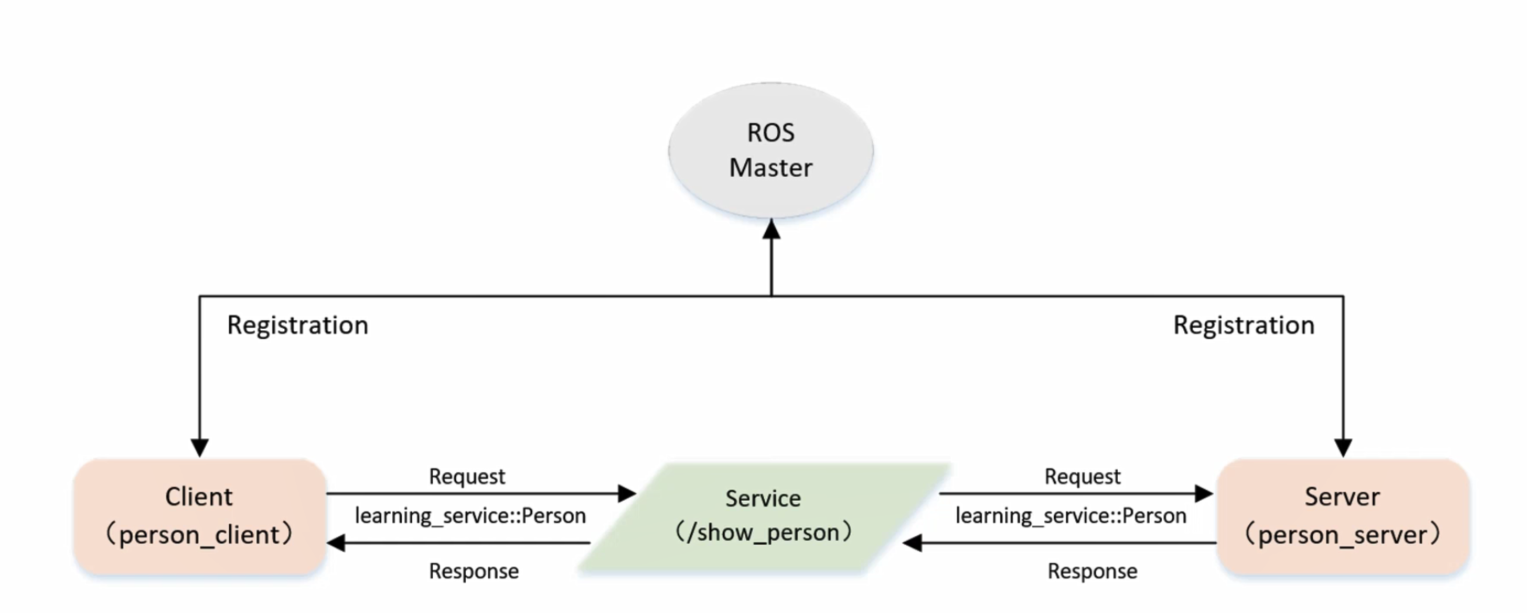
回顾一次 上面是 resquest
下面是 respond
步骤梳理
- 定义 srv 文件
- 在package.xml 中添加功能包 依赖
- 在CMakeList.txt 添加编译选项
- 编译生成语言相关的文件
实际操作
在工作空间内 创建一个叫做 srv的文件夹
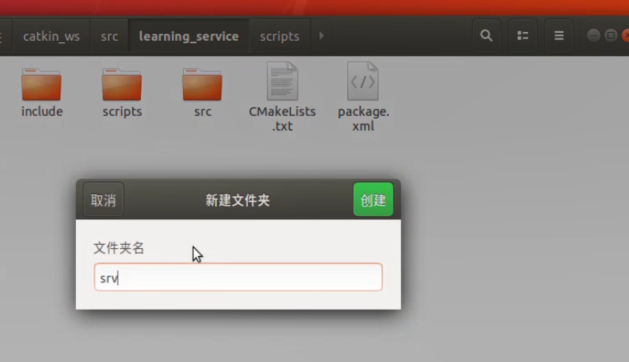
在这里面我们创建一个新的文件
touch Person.srv
创建一个内容 把我们要的下的内容
string name
uint8 age
uint8 sex
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
- - -
string result
编译步骤
package 里生成动态的生成包


















 278
278

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











