



在工业及协作场景中,机械臂与环境的精准力跟踪交互是核心需求,而传统控制器存在参数调优耗时、环境适应性差等问题。本文聚焦Franka Research 3机械臂,引入ORACLE 新型控制策略,旨在提升其交互控制性能。
该策略以阻抗控制器为基础保障系统稳定性,通过前馈神经网络(FFNN)集成模型学习机器人 - 环境交互动力学,精准预测交互力;再通过最优残余动作算法,在基础控制器输出的邻域内搜索最优修正量,最小化力跟踪误差,同时利用正则项避免动作突变与过度侵入环境。
该策略利用神经网络增强了Franka机械臂在未知环境下的力追踪(Force Tracking)能力,有效解决了传统阻抗控制在力追踪精度上的不足。
核心挑战:柔顺性与精准度的博弈
在机器人打磨、装配或医疗辅助等任务中,机械臂必须与环境接触。
阻抗控制(Impedance Control):这是Franka机械臂的强项,它赋予机器人"弹簧-阻尼"特性,使其在接触时保持柔顺,避免损坏环境。但其缺点在于难以精确追踪特定的接触力,除非对环境有极其精确的建模。
直接力控制(Direct Force Control):虽然能精准追踪力,但在未知或刚性变化的环境中极易失稳,且参数调试耗时。
ORACLE策略的创新点在于:它保留了Franka机械臂底层的阻抗控制:器以保证稳定性,同时引入一个基于Al的"优化残差动作"层,通过预测环境交互力来实时修正机器人的运动,从而实现高精度的力追踪。
ORACLE系统架构与工作原理
ORACLE系统由三个核心模块组成,形成了一个层级化的控制回路
1、底层:力-阻抗控制器(BaseController)
系统首先部署了一个基础的力-阻抗控制器。
-
阻抗控制:利用Franka的底层接口,以1kHz的频率运行,确保机器人与环境接触时的物理柔顺性。
-
PI力控制:在接触方向上闭环,生成一个初步的位置设定点:¨xf。
2、核心:神经网络力估计器(ForceEstimator)
这是ORACLE的"大脑"。研究人员使用前馈神经网络(FFNN)集成了环境模型
-
输入:机器人的末端位姿
-
输出:预测该状态下产生的环境接触力feny。
-
训练:通过在Franka机器人上执行随机的力轨迹(正弦波、斜块皮等)收集数据,让网络学习机器人与特定环境的交互动力学。
3、决策:优化残差动作(Optimized Residual Action)
在每个控制周期(100Hz),ORACLE算法会求解一个优化问题

它在当前位置的微小邻域内搜索一个最佳的修正量(残差动作xc),使得预测的接触力最接近目标力fi。这个修正量最终叠加到基础控制器的指令上,驱动Franka机器人执行。
实验验证:FrankaResearch3的实战表现
为了验证该策略,研究团队在MuJoCo仿真环境和真实的Franka平台上进行了严格测试。
实验设置
-
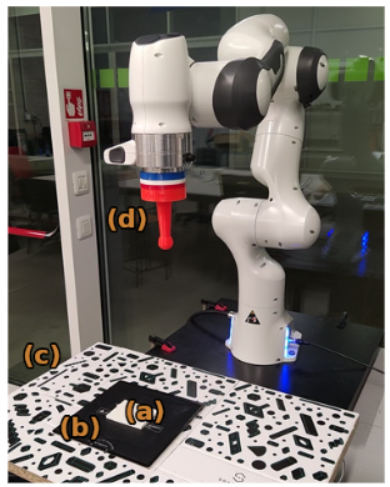
硬件平台:Franka Research 3 7自由度机械臂。
-
交互环境:为了模拟真实工业场景中的不确定性,使用了三种不同刚度的材料(Kent)~5000,10500,23000 N/m)。
-
特殊设计:在真实实验中,接触块被安装在一个可滑动的基座上,以减少粘滞滑移(Stickslip)效应,保证数据的纯净性。
性能提升数据
实验要求Franka机械臂在接触面上追踪一个复杂的力参考曲线(包含斜坡、恒力保持和衰减正弦波)。结果显示,ORACLE策略显著提升了性能:
1.力追踪误差大幅降低:
-
在仿真中,均方误差(MSE)平均降低了4.64倍。
-
在真实Franka机器人上,MSE平均降低了2.67倍。即使在环境刚度发生变化时,ORACLE依然能保持优越性能,证明了其鲁棒性。
2.消除超调(Overshoot):引入正则化项(Regularizers)后,系统成成功消除了阶跃响应中的力超调现象(如图3c所示),这对于精密装配等任务至关重要,防止了过大的力损坏工件。
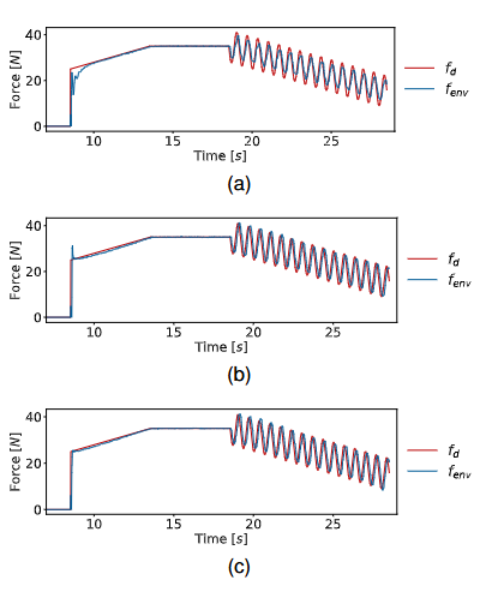
3.对动态信号的追踪:相比于基础控制器在追踪1.5Hz正弦波时的滞后和幅度衰减,启用ORACLE后,Franka机器人能够非常精准地复现目标波形.
局限性于未来展望
-
原因:这主要是由神经网络的推理时间以及上层控制回路(100Hz)与底层阻抗控制(1kHz)之间的通讯与计算耗时导致的。
-
影响:导致实际力曲线在时间轴上略有滞后,但并未影响波形的整体准确度。
-
解决方案:未来可以通过GPU加速神经网络推理,或减小优化搜搜索的空间来降低延迟。
结论
这项研究证明,Franka Research 3结合ORACLE策略,能多在无需复杂人工调参的情况下,自主学习环境特性并实现高精度的力控制。
对于使用Franka机械臂进行科研或工业应用的用户而言,这提供了一个极具价值的思路:利用轻量级的神经网络(仅需约3ms推理时间)作为"预言机"(Oracle),可以低成本地显著提升现有阻抗控制器的动态性能。这种"基础控制保障安全,Al优化提升精度"的混合架构,将是未来智能机器人交互控制的重要发展方向。
论文详情:https://www.techrxiv.org/doi/full/10.36227/techrxiv.21905433.v1

















 1399
1399

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









