




研究背景
在以人为中心的环境中,机器人与人类、周围环境或其他机器的物理交互需要兼顾柔顺性与安全性。尽管柔顺硬件能在一定程度上助力此类交互,但阻抗控制器作为扭矩控制机器人实现安全、被动响应接触并精准执行任务的关键,其有效性高度依赖机器人及所操作物体的精确动力学模型。
现实中,模型失配常导致任务失败和不安全行为,例如机器人末端执行器负载变化时,原有模型难以适应,可能引发轨迹偏移或不稳定。
宾夕法尼亚大学研究人员以Franka Research 3 机械臂为实验载体,提出了快速失配估计(RME)框架,这是一种自适应、与控制器无关的概率框架。
最新款Franka Research 3 具有7 自由度设计与可靠性能,让复杂的静态和动态交互实验得以顺利开展,充分验证了 RME 框架的有效性。
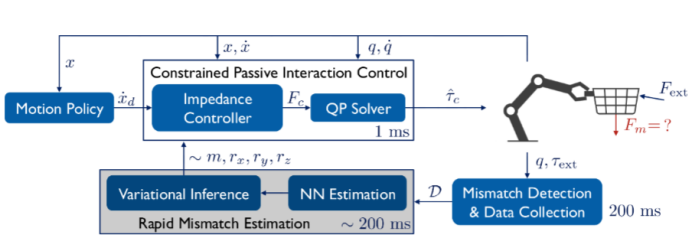
图 1:该框架无需外部力- 扭矩传感器,仅通过机器人的本体感受反馈,就能在线估计末端执行器的动力学失配,且能在约 400 毫秒内适应末端执行器质量和质心的突然变化,有效解决了模型失配带来的问题,保障了机器人在静态和动态场景下与环境交互的安全性和稳定性。
研究核心方法
整体框架
RME 框架以贝叶斯推理为基础,结合神经网络和变分推理实现快速失配估计。首先通过失配检测算法监控外部扭矩的变化,判断是否出现动力学失配;当检测到失配后,收集相关数据并输入神经网络模型失配估计器得到先验分布;最后利用变分推理对先验分布进行优化,快速收敛到失配参数的估计值。
神经网络模型失配估计器
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6099
6099


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言








