




 这篇博客介绍了如何运用迪杰斯特拉算法在大规模有向图中寻找两个源点到共同目的地的最短路径。作者指出,常规方法可能会导致错误答案,因为公共边会被重复计算。解决方案是枚举公共路径起点,并分别计算源点到起点、起点到目的地的最短路径。此外,注意数据类型需使用longlong以避免溢出。
这篇博客介绍了如何运用迪杰斯特拉算法在大规模有向图中寻找两个源点到共同目的地的最短路径。作者指出,常规方法可能会导致错误答案,因为公共边会被重复计算。解决方案是枚举公共路径起点,并分别计算源点到起点、起点到目的地的最短路径。此外,注意数据类型需使用longlong以避免溢出。
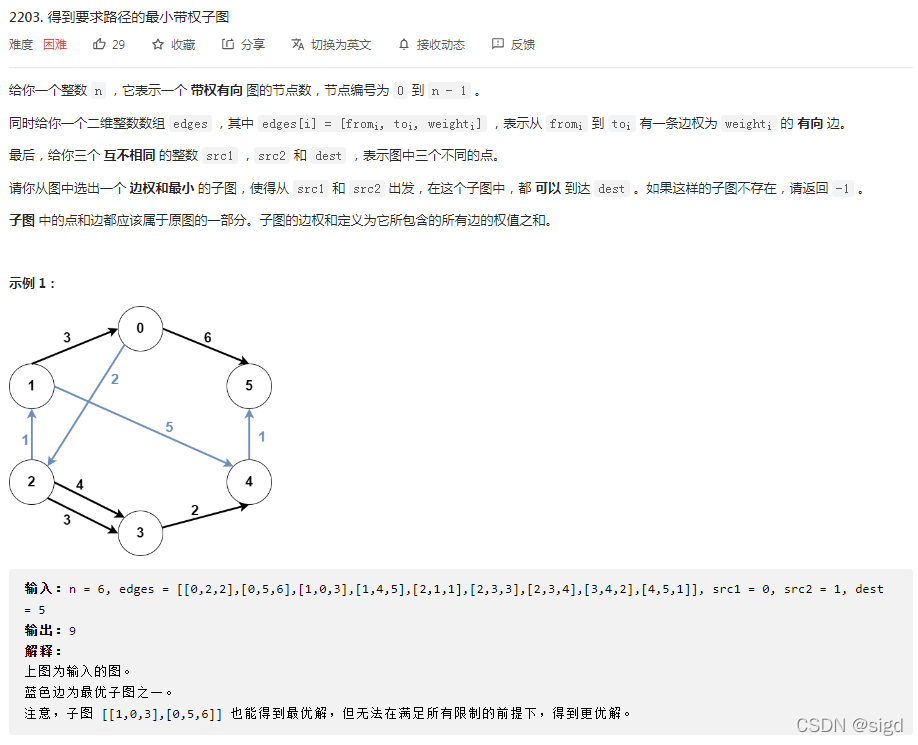
解题思路:这个题思路相对简单,考察优化的迪杰斯塔拉算法。
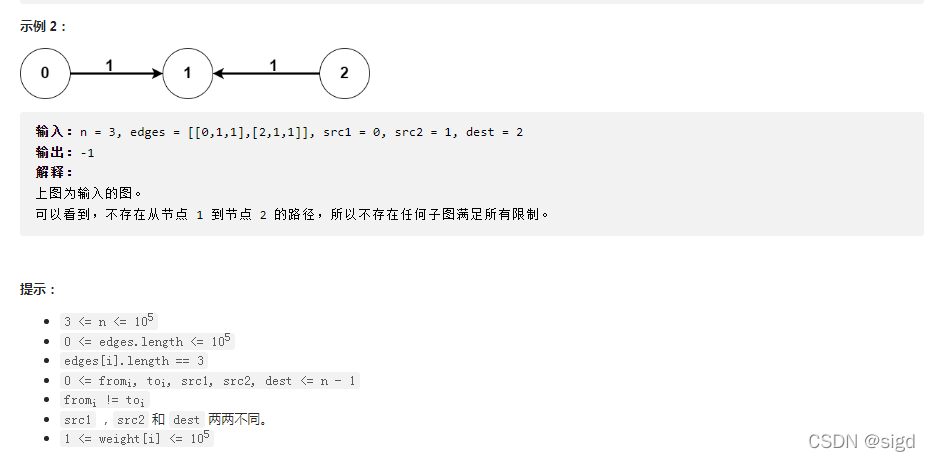
题意s1和s2存在到dest的路径,而且又要子图权值最小。
先介绍一个知识点,在有向图求多个点s1...sx到一个点d的最短路径时,解决方式是将图结构反向存储,然后求d到其他点最短路径。
当然,我们并不需要求出dest到s1和s2的最短路径和,因为很容易证明这个和不是答案,因为可能存在公共边,公共边不需要计算两次。这些公共边构成了“公共路径”,这条公共路径终点必然是dest,起点不确定。
实际上通过模拟可以知道,公共路径起点可以是任意一个点,包括(src1,src2,dest)。
因此,枚举这个公共路径起点,假设它为X,这样答案就是:src1到X最短距离+src1到X最短距离+X到dest最短距离。
因此做三次最短路径算法,其中src1和src2的最短路径用原图,X到dest的最短路径将图反向存储,再求dest到其他点最短路径。
因为此题目数据比较大,一旦不开longlong的结果就是无情的WA(我中招了)。
class Solution {
public:
struct node
{
long long adj,v;/**< 习惯性用结构体,其实用pair就行 */
bool operator <(const node B)const
{
return v>B.v;
}
};
void getPath(int n, vector<node >e[], int s, long long d[])
{
priority_queue<node>pq;/**< 优先队列找到最短路径 */
int i,j;
for(i=0;i<n;i++)
d[i]=20000000000,pq.push({i,20000000000});
d[s]=0;
pq.push({s,0});
for(j=1;j<n;j++)
{
int now=pq.top().adj;
pq.pop();
for(i=0;i<e[now].size();i++)
{
int y=e[now][i].adj,z=e[now][i].v;
if(d[y]>d[now]+z)
d[y]=d[now]+z,pq.push({y,d[y]});
}
}
}
long long minimumWeight(int n, vector<vector<int> >& edges, int src1, int src2, int dest) {
long long i,j,s1[100005],s2[100005],d[100005],ans=30000000000;
vector<node > e [n+1],e2[n+1];
for(i=0;i<edges.size();i++ )
{
e[edges[i][0]].push_back({edges[i][1],edges[i][2]});
e2[edges[i][1]].push_back({edges[i][0],edges[i][2]});
}
getPath(n,e,src1,s1);
getPath(n,e,src2,s2);
getPath(n,e2,dest,d);/**< 求dest时用反向图结构 */
for(i=0;i<n;i++)
ans=min(ans,d[i]+s1[i]+s2[i]);
if(ans>=20000000000)
ans=-1;
return ans;
}
};

















 1200
1200

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









