






 本文详细记录了在VMware虚拟机中安装Ubuntu 16.04和ROS Kinetic的过程,包括软件配置、安装步骤及遇到的问题解决方案,特别关注了ROS安装中常见的错误和重装技巧。
本文详细记录了在VMware虚拟机中安装Ubuntu 16.04和ROS Kinetic的过程,包括软件配置、安装步骤及遇到的问题解决方案,特别关注了ROS安装中常见的错误和重装技巧。
刚开始接触Ubuntu和ROS,装双系统太麻烦,不便于学习,就想着先在虚拟机上玩玩 ,练习一下基本操作。记载一下自己的安装过程和遇到的坑.
软件配置 : VMware-workstation 14.1.4 + ubuntu-16.04.5-desktop-amd64 + ros-kinetic-kame
相关软件资源:(其它版本到官网下载)
VMware-workstation 14.1.4 链接:https://pan.baidu.com/s/1-YdT9Wa5N5f4eJ9BOseHEg 提取码:k4gh
ubuntu-16.04.5-desktop-amd64 链接:https://pan.baidu.com/s/1Bp7HtodjqDRnha7IOU_fqQ 提取码:gbcy
VMware安装过程,参考链接:https://jingyan.baidu.com/article/9f7e7ec09da5906f281554d6.html
VMware虚拟机安装ubuntu,参考链接:https://blog.youkuaiyun.com/dcrmg/article/details/74075254
解决VMware主窗口中的虚拟机窗口太小的问题,参考链接:https://www.jianshu.com/p/9fca51d0d120
以上过程都很顺利,在安装ROS过程中,出了点状况,着重说明一下:
按照网上相关安装教程,如:https://www.cnblogs.com/liu-fa/p/5761448.html和https://blog.youkuaiyun.com/sinat_39411798/article/details/80591605,
基本过程如下:
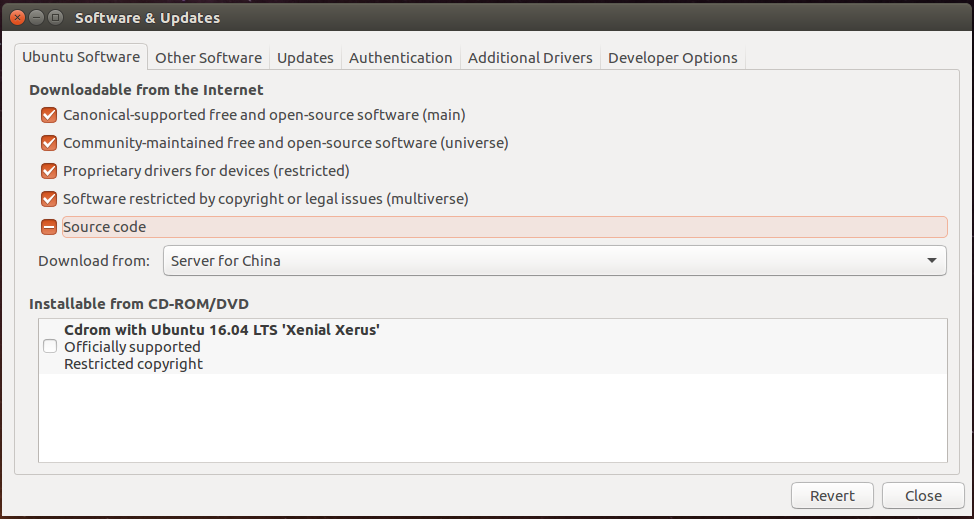
1.软件中心配置
2.添加源
也可以是国内镜像源,速度会快些。
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'3.设置key
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA1164.更新
$ sudo apt-get update5.安装
$ sudo apt-get install ros-kinetic-desktop-full第一次安装时,大概要0.5-1小时
6.初始化ROS
命令:
$ sudo rosdep init
$ rosdep update第一次安装ROS时,在执行sudo rosdep init 命令时,会报错,此时,
执行 rospack find rosdep,找出rosdep这个包的路径,如果没有,则会显示:程序“rosdep”尚未安装,使用以下命令安装:sudo apt install rospack-tools 安装好后,即可执行:sudo rosdep init
7.配置环境变量
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc第一次安装ROS时,在运行 $ source ~/.bashrc 命令时会,出现:
yuan@linx-c:~$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
yuan@linx-c:~$ source ~/.bashrc
bash: /opt/ros/kinetic/setup.bash: 没有那个文件或目录此时,去看opt目录也是空的。网上搜了很多,也没能解决问题。
最初甚至以为是ubuntu系统的问题,将ubuntu重装之后,在新系统下进行ROS的初次安装,还是会出现以上问题。
抱着尝试的态度,在初次安装失败时,进行重装,这次居然出奇的顺利。重装过程参考:https://my.oschina.net/lvzht/blog/645873
重装时的大致流程如下:
依次执行以下命令:
sudo apt-get remove ros-*
sudo dpkg --clear-avail
sudo dpkg --configure -a
sudo apt-get install -f
sudo apt-get update
sudo apt-get upgrade
之后,再进行一遍1-7的安装步奏。
重装时,速度很快,不到10分钟就完成了,应该是第一次安装时相关资源包都有下载的缘故;安装过程中,不会再出现第6步和第7步的问题。
PS:安装过程很奇怪,也没找到第7步问题的根本原因,不过连续两次进行安装,确实能安装成功。仅供参考。

















 3832
3832

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









