






20.04编译LEGO-LOAM:Error: GTSAM was built against a different version of Eigen
1.你在gtsam空间cmake之后,就会有相应的信息: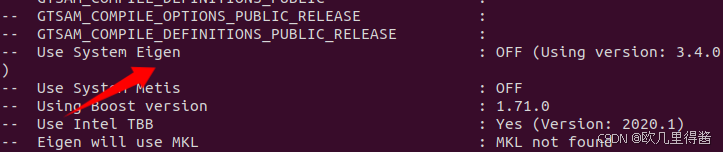
从输出信息来看,GTSAM 使用了自带的 Eigen 3.4.0 版本,而不是系统中安装的 Eigen 库。即使你已经通过 -DGTSAM_USE_SYSTEM_EIGEN=ON 选项指定了使用系统中安装的 Eigen 库,但 CMake 仍然选择了自带的 Eigen 版本----这个错误很顽固
解决方法:
1.查看你的Eigen版本(可选):
dpkg -l | grep libeigen3-dev2.进入你的gtsam的build目录,并运行,手动配置
cmake -DGTSAM_USE_SYSTEM_EIGEN=ON -DEigen3_DIR=/usr/include/eigen3 ..3.继续编译
make -j$(nproc)4.安装
sudo make install然后就可以继续编译lego-loam了。


















 892
892

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









