




✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
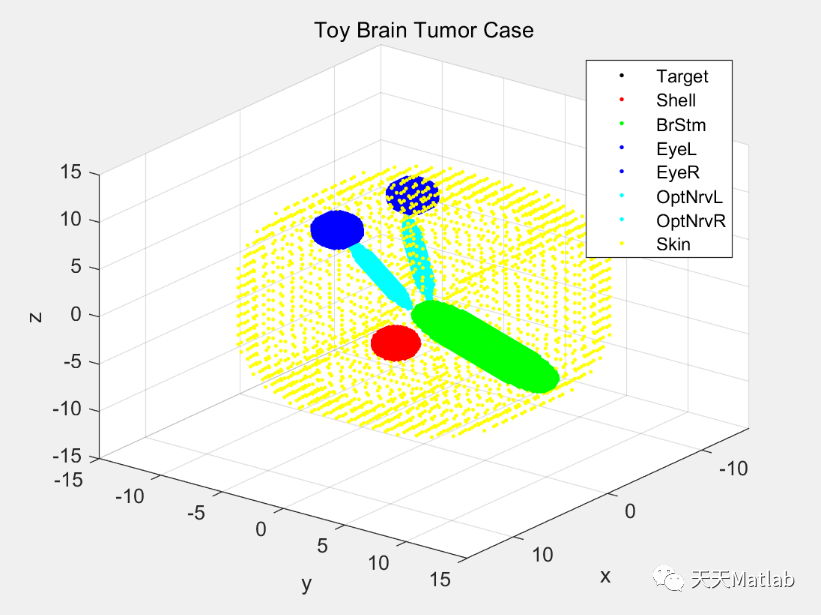
放射治疗是一种常见的脑肿瘤治疗方法,它利用高能射线来杀死癌细胞并减少肿瘤的体积。然而,制定一个合理且高效的放射治疗计划并不容易,因为这需要考虑到多个因素,如肿瘤的大小、位置、形状以及周围正常组织的保护等。为了解决这个问题,研究人员一直在寻找新的方法来优化放射治疗计划。
最近,一种基于交替方向乘子法(ADMM)的方法在脑肿瘤病例的放射治疗计划优化中引起了广泛关注。ADMM是一种用于解决约束优化问题的迭代算法,它通过将原问题分解为多个子问题来求解。在脑肿瘤放射治疗计划中,ADMM可以将优化问题分解为两个子问题:一个是用于确定剂量分布的子问题,另一个是用于确定辐射束形状的子问题。
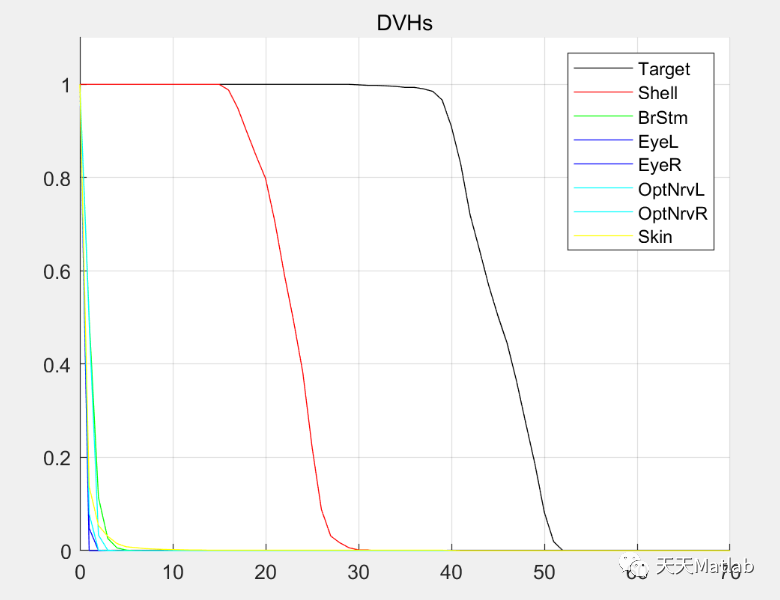
在确定剂量分布的子问题中,ADMM使用了一个称为剂量矩阵的变量来表示剂量分布。通过最小化目标函数,该子问题可以找到最佳的剂量分布,从而最大限度地杀死癌细胞并减少对正常组织的损害。在确定辐射束形状的子问题中,ADMM使用了一个称为形状矩阵的变量来表示辐射束的形状。通过最小化目标函数,该子问题可以找到最佳的辐射束形状,从而更好地覆盖肿瘤并减少对正常组织的辐射。
通过交替求解这两个子问题,ADMM可以逐步优化放射治疗计划,最终得到一个合理且高效的解决方案。与传统的优化方法相比,基于ADMM的方法具有更快的收敛速度和更高的计算效率。此外,ADMM还可以灵活地处理各种约束条件,如剂量限制和器官保护要求,从而使得放射治疗计划更加个性化和精确。
然而,基于ADMM的脑肿瘤放射治疗计划优化仍然存在一些挑战和限制。首先,该方法需要合理的初始解,否则可能会陷入局部最优解。其次,由于放射治疗计划优化问题的复杂性,计算时间可能较长,尤其是对于大规模的病例。此外,该方法还需要进一步的实验验证和临床应用,以验证其在实际应用中的有效性和可行性。
总之,基于ADMM的脑肿瘤病例优化放射治疗计划研究为脑肿瘤患者提供了一种新的治疗方案。通过逐步优化剂量分布和辐射束形状,这种方法可以提供更好的治疗效果和更少的副作用。然而,该方法仍然需要进一步的研究和改进,以提高其在实际临床中的应用价值。相信随着技术的不断进步和研究的深入,基于ADMM的脑肿瘤放射治疗计划优化将为患者带来更好的治疗效果和生活质量。
📣 部分代码
function [holeDetected,Circmcenter,circumradius,F3,F4]= holeDetection(TRI,nodes,...F1,F2,Trange,area,figureno,flag)%%%flag= whether to plot or not; 1 to plot, 0 not to plot%%TR = triangulation(TRI,nodes.pos(:,1),nodes.pos(:,2));[Circmcenter,circumradius] = circumcenter(TR); % calculate the circumcenter of each triangle% remove the circumcenter outside the area% ind=Circmcenter(:,1)>area(1);% Circmcenter(ind,:)=[];% circumradius(ind,:)=[];% ind1=Circmcenter(:,2)>area(2);% Circmcenter(ind1,:)=[];% circumradius(ind1,:)=[];% TR.ConnectivityList(ind,:)=[];% TR.ConnectivityList(ind1,:)=[];% TRI(ind,:)=[];% TRI(ind1,:)=[];% calculate the adjacent traingle common side distance and detect holesholeDetected=zeros(size(TRI,1),1);for ii=1:size(TRI,1)% condition to check if circulcenter is not outside the areaif 0<Circmcenter(ii,1)&&Circmcenter(ii,1)<area(1)&&0<Circmcenter(ii,2)...&&Circmcenter(ii,2)<area(2)ID = edgeAttachments(TR,TRI(ii,1),TRI(ii,end)); % neighboring traingle IDneighboringID=cell2mat(ID);if numel(neighboringID)~=1 % on condition if no adjacent traingle existcommonsideIndex=ismember(TRI(ii,:),TRI(neighboringID(2),:));commonside=TRI(ii,commonsideIndex);if ~isempty(commonside) % check if both traingles sides are commonif flag==1figure(figureno)F3=line([TR.Points(commonside(1),1),TR.Points(commonside(2),1)],...[TR.Points(commonside(1),2),TR.Points(commonside(2),2)],...'Color','black','LineStyle','--');endcommomnside_dist=pdist([TR.Points(commonside(1),:);TR.Points(commonside(2),:)]);%check if distance is greater than twice of sensor radius(paper[24])if commomnside_dist>2*TrangeholeDetected(ii,1)=1;triangleNodes=TRI(ii,:);if flag==1for kk=1:3x(kk)=TR.Points(triangleNodes(kk),1);y(kk)=TR.Points(triangleNodes(kk),2);endF4=fill(x,y,'c');alpha 0.1endelseholeDetected(ii,1)=0;endendendendend% plot the hole circleif flag==1holeTriangleIndex=find(holeDetected);for ii=1:numel(holeTriangleIndex)[x,y]=circle(Circmcenter(holeTriangleIndex(ii),1),...Circmcenter(holeTriangleIndex(ii),2),abs(Trange-circumradius(holeTriangleIndex(ii))));F5=plot(x,y,'.g');clear x yhold onendendylim([-area(2)/6,area(2)+area(2)/6])xlim([-area(2)/6,area(1)+area(2)/6])if flag==1if exist('F4','var')&& exist('F5','var')% legend([F1,F2,F3,F4,F5],{'nodes','covered Area','common side','holes','IESC'},'Location',...% 'north','Orientation','Horizontal')else% legend([F1,F2,F3],{'nodes','covered Area','common side'},'Location',...% 'north','Orientation','Horizontal')F4=[]; F5=[];endend
⛳️ 运行结果


















 785
785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











