



如果你已经学过 Stanley 或 PurePursuit 算法,可能会发现一个特点:它们都是 “哪里偏了补哪里” 的几何跟踪方法 —— 看到小车离路径远了、方向歪了,再调整方向盘。但如果想让小车 “更聪明”,比如提前考虑 “车身惯性”“转弯力度”,避免猛打方向盘或晃荡,那LQR(线性二次调节器) 就是更合适的选择。
LQR 是自动驾驶路径跟踪里 “基于模型的最优控制” 入门款,核心逻辑很简单:先给小车画一张 “运动蓝图”(数学模型),再算一个 “又准又稳” 的控制方案—— 既让小车贴紧路径,又不让控制动作太激烈。哪怕你刚接触 “最优控制”,也能通过这篇文章搞懂它的核心思路。
一、先想明白:为什么需要 LQR?
在学 LQR 之前,先回顾下之前的算法问题:Stanley 和 PurePursuit 都不怎么考虑小车的 “物理特性”。比如:
- 小车有惯性,猛打方向盘会晃;
- 转向电机有最大转角,不能转太狠;
- 高速和低速时,小车的反应完全不一样。
而 LQR 的优势就在于:它会先 “摸清小车的脾气”(建立运动模型),再根据模型算 “最优的控制动作”—— 不是 “粗暴纠正偏差”,而是 “优雅地引导小车回到路径”。
举个生活化的例子:
- Stanley/PurePursuit 像 “新手开车”:看到偏了就猛打方向,修正过头了再往回打,容易晃;
- LQR 像 “老司机开车”:提前预判车身惯性,轻轻打方向,既不跑偏又平稳。
二、LQR 的核心:先建 “模型”,再找 “最优”
LQR 的逻辑分两步:先给小车建一个 “线性运动模型”(告诉算法小车怎么动),再定义一个 “代价函数”(告诉算法什么是 “好的控制”),最后算出让代价最小的控制方案。
1. 第一步:给小车建 “运动蓝图”—— 线性状态方程
小车的运动不是随心所欲的,比如 “打 10° 方向盘,小车会怎么拐”,是有物理规律的。LQR 会把这个规律写成一个线性状态方程(核心公式 1),这是 LQR 的 “基础”:
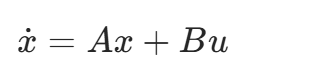
别被符号吓到,我们逐个拆成 “人话”,用小车最常用的 “自行车模型” 举例:
| 符号 | 含义(小车场景) | 通俗解释 |
|---|---|---|
| . x | 状态变化率 | 小车 “下一步” 的状态变化(比如横向偏差会变大还是变小) |
| x | 状态向量 | 描述小车 “当前情况” 的关键信息,比如:\(x = [横向偏差, 航向误差, 横向速度]\)(这三个量能反映小车是否跑偏、会不会继续跑偏) |
| A | 状态矩阵 | 小车 “自身运动的规律”:比如横向偏差怎么影响后续的航向误差(由小车物理参数决定,如轴距、质量) |
| B | 控制矩阵 | 控制动作对小车的影响:比如打方向盘(控制量)会让横向偏差怎么变 |
| u | 控制量 | 我们能给小车的指令:这里就是 “前轮转角”(和 Stanley、PurePursuit 的控制目标一样) |
关键补充:为什么叫 “线性”?因为小车的真实运动是 “非线性” 的(比如大转角时,运动规律不是直线关系),但 LQR 会把它 “近似成线性”(比如在 “接近路径” 的小范围内,运动规律接近直线),这样才能用上面的方程计算 —— 这就是 “线性化”,是 LQR 的核心前提,但不用你手动算,仿真工具(如 Python 的 scipy)能帮你搞定。
2. 第二步:定义 “好控制” 的标准 —— 代价函数
有了模型,LQR 还需要知道 “什么样的控制是好的”。比如:
- 希望小车离路径越近越好(横向偏差小);
- 希望方向盘别猛打(转角变化小,避免晃荡);
- 这两个目标可能冲突(比如为了快速纠偏,不得不猛打方向),需要 “权衡”。
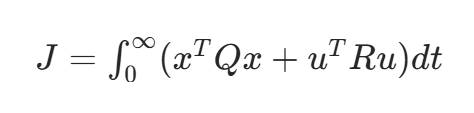
LQR 用二次型代价函数(核心公式 2)来量化这个标准,目标是让这个函数的值最小:
同样拆成 “人话”:
| 符号 | 含义 | 通俗解释 |
|---|---|---|
| J | 总代价 | 代价越小,控制效果越好 |
| x^TQx | 状态代价 | 衡量 “跑偏的严重程度”:Q是 “权重矩阵”,你想让 “横向偏差” 更重要,就把Q里对应 “横向偏差” 的位置设大一点(比如设 10);想让 “航向误差” 没那么重要,就设小一点(比如设 1) |
| u^TRu | 控制代价 | 衡量 “控制动作的激烈程度”:R是 “控制权重矩阵”,你想让方向盘别猛打,就把R设大一点(比如设 5);如果允许激烈调整,就设小一点(比如设 1) |
| 积分 | 考虑 “整个过程” 的代价,不是只看某一瞬间 |
举个例子:如果你的小车是实验室的低速小车,怕晃荡,就把R设大(比如\(R=10\)),这样 LQR 会优先保证方向盘平缓;如果是高速小车,怕跑偏,就把Q里 “横向偏差” 的权重设大(比如设 20),优先保证贴紧路径。
3. 第三步:算出 “最优控制”—— 反馈增益 K
有了模型(\(\dot{x}=Ax+Bu\))和代价标准(J),LQR 会通过求解一个叫 “黎卡提方程” 的数学方程(不用你手动解,工具能算),得到一个最优反馈增益矩阵 K,最后用下面的公式输出控制量(前轮转角):
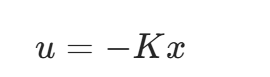
这是 LQR 的 “最终执行公式”,逻辑特别直接:
- 小车的当前状态x(比如横向偏差 2cm、航向误差 3°)乘以K,得到一个 “调整量”;
- 加个负号,意思是 “反向纠正”(比如横向偏差在左边,就输出右拐的转角);
- 最终的u就是 “最优的前轮转角”,既纠正了偏差,又不会太激烈。
三、LQR 怎么 “工作”?三步循环
和 Stanley 的 “实时循环” 类似,LQR 在小车上运行时,也是每秒几十次重复下面三步,保证持续最优控制:
- 测状态:通过传感器(如 GPS、IMU、里程计)获取小车当前的状态x(横向偏差、航向误差、横向速度);
- 算转角:把x代入\(u=-Kx\),算出最优的前轮转角u(这里的K是提前通过黎卡提方程算好的,运行时不用再算);
- 控小车:把转角u发给转向电机,小车执行后,进入下一次循环,重复 1-3 步。
关键区别:Stanley 是 “看到偏差再补偿”,而 LQR 是 “根据模型预判偏差变化,提前输出最优控制”—— 比如小车刚有点跑偏趋势,LQR 就已经算出 “最小力度的转角”,避免偏差变大。
四、LQR vs Stanley/PurePursuit:该选哪个?
作为新手,你可能会纠结 “学了几何算法,为什么还要学 LQR”。用一张表对比,你就清楚了:
| 对比维度 | LQR 算法 | Stanley/PurePursuit 算法 |
|---|---|---|
| 核心逻辑 | 基于模型的 “最优控制”(预判 + 权衡) | 基于几何的 “偏差补偿”(哪里偏补哪里) |
| 跟踪精度 | 更高(考虑小车动力学,不易跑偏) | 稍低(低速 OK,高速易晃) |
| 稳定性 | 更好(控制动作平缓,不易超调) | 一般(可能因偏差大而猛打方向) |
| 依赖条件 | 需小车模型(如轴距、质量)和线性化 | 无需模型(只需几何位置) |
| 实现难度 | 中等(需理解模型和权重调节) | 简单(只需算偏差) |
新手建议:先在仿真里实现 LQR(不用真实小车模型),比如用 Python 的scipy.linalg.solve_continuous_are求解黎卡提方程,再和 Stanley 对比 —— 你会明显看到 LQR 的控制动作更平缓,跟踪精度更高,这就是 “最优控制” 的优势。
总结
LQR 的核心不是 “复杂的数学”,而是 “先懂小车,再做最优决策”—— 它不像 Stanley 那样 “见招拆招”,而是提前通过模型预判小车的运动,再用代价函数权衡 “精度” 和 “平稳”,最后输出最优控制。
如果你想从 “简单几何跟踪” 升级到 “基于模型的控制”,LQR 是必经之路。试着用仿真实现它,再和之前的算法对比,你会对自动驾驶的 “控制逻辑” 有更深的理解 —— 这不仅能帮你搞定小车实验,也能为后续学更复杂的 MPC 算法打下基础~

















 4843
4843

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









