



如果你玩过自动驾驶小车(比如实验室的差速小车、ROS 小车),可能会遇到一个问题:明明设定了直线或弯道路径,小车却总是 “画龙”—— 要么离路径越来越远,要么车头方向不对。
今天要讲的 Stanley 算法,就是解决这个 “跑偏” 问题的经典方案。它是 MIT 团队为 DARPA 自动驾驶挑战赛设计的,核心逻辑特别简单:同时纠正 “离路径的距离” 和 “车头的方向”,让小车稳稳跟着路线走。哪怕你是刚接触路径跟踪的新手,也能轻松理解它的原理。
一、先搞懂:小车 “跑偏” 的两个原因
要解决跑偏,得先知道小车怎么判断自己 “偏了”。Stanley 算法只关注两个关键偏差,就像人走路偏了会看 “离路边多远” 和 “头朝没朝前方”:
1. 横向偏差(y):我离路径有多远?
假设小车沿着一条参考路径(比如你用代码画的直线、圆弧)行驶,我们以小车后轮中心为 “观察点”(因为车辆动力学通常以后轮为基准,就像人走路以脚为支点),这个点到参考路径的垂直距离,就是 “横向偏差”,记为 y。
- 如果
y>0:小车在路径的左边(假设路径是向右的); - 如果
y<0:小车在路径的右边; - 如果
y=0:小车正好在路径上,没偏!
2. 航向偏差(θₑ):我的车头朝对了吗?
光在路径上还不够,车头方向得和路径一致。比如路径前方是 “向右拐”,但小车车头还朝正前方,这时候就有 “航向偏差”,记为 θₑ。
它的定义很简单:小车当前的航向角(车头朝的方向)减去参考路径在 “最近点” 的切线角(路径朝的方向)。
- 如果
θₑ>0:车头比路径 “偏右” 了; - 如果
θₑ<0:车头比路径 “偏左” 了; - 如果
θₑ=0:车头正好顺着路径方向,没歪!
二、Stanley 的核心:一个公式算出路转角
知道了两个偏差,Stanley 算法用一个公式就能算出小车前轮该转多大角度(转角 δ),让小车纠正偏差、回到路径上。这就是它的核心公式,也是唯一需要记住的公式:
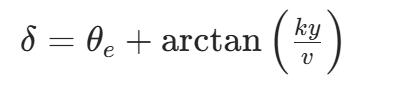
我们来逐个拆解公式里的每个部分:
| 符号 | 含义 | 作用 |
|---|---|---|
| δ | 前轮转角 | 最终要控制的量:δ 正表示右拐,δ 负表示左拐 |
| θₑ | 航向偏差 | 直接补偿 “车头方向”:比如 θₑ正(车头偏右),就左拐一点抵消 |
| k | 调节系数(增益) | 控制 “横向偏差补偿” 的力度:k 越大,对横向偏差的反应越灵敏 |
| y | 横向偏差 | 反映 “离路径的距离”:y 越大,需要拐的角度越大 |
| v | 小车当前速度 | 防止 “高速猛拐”:速度越快,v 越大,横向偏差的补偿项(ky/v)越小,避免小车晃荡 |
举个例子帮你理解:假设小车以 v=5km/h 行驶,横向偏差 y=10cm(离路径有点远),航向偏差 θₑ=5°(车头偏右),调节系数 k=0.5。代入公式:横向补偿项 = arctan ((0.5×0.1)/5) ≈ arctan (0.01) ≈ 0.57°前轮转角 δ = 5° + 0.57° ≈ 5.57°(右拐约 5.6°)这样一来,小车既纠正了 “车头偏右” 的问题,又慢慢回到了路径上,不会因为离路径远就猛拐。
三、Stanley 算法怎么 “工作”?四步走
公式看起来简单,但算法实际运行时,是一个 “实时循环” 的过程。就像人走路时 “不断看路、不断调整方向”,小车也会每秒跑几十次这个循环:
- 找 “最近的路点”:小车通过 GPS、激光雷达或里程计知道自己的位置后,先在参考路径上找到 “离自己后轮中心最近的那个点”(比如路径是由 1000 个点组成的,找其中距离最小的点)。
- 算两个偏差:根据最近路点,计算当前的横向偏差
y和航向偏差θₑ(用几何方法或坐标计算,不需要复杂公式)。 - 算转角:把
θₑ、y、v、k代入核心公式,算出前轮该转的角度δ。 - 控制车轮:把转角
δ发给小车的转向电机,让车轮转起来;同时进入下一次循环,重复 1-4 步。
四、Stanley vs PurePursuit:新手该选哪个?
如果你之前学过 PurePursuit(纯追踪)算法,可能会问:这两个都是几何跟踪算法,该用哪个?
简单说,两者各有优势,适合不同场景:
| 对比维度 | Stanley 算法 | PurePursuit 算法 |
|---|---|---|
| 核心逻辑 | 同时补偿 “航向偏差 + 横向偏差” | 盯着 “前方一个点”,画圆弧跟踪 |
| 低速精度 | 更高(因为考虑了航向,不容易晃) | 稍低(可能因为只看前点,方向调整慢) |
| 高速稳定性 | 一般(速度快时对参数 k 敏感,需调小) | 稍好(前视距离调大后,转弯更平缓) |
| 实现难度 | 简单(只需算两个偏差,一个公式) | 简单(只需找前视点,算圆弧半径) |
新手建议:先学 Stanley,因为它能帮你理解 “偏差补偿” 的逻辑,而且低速场景(比如实验室小车)下精度更高,和 PurePursuit 对比时,差异也更明显。
总结
Stanley 算法之所以经典,就是因为它用 “最简单的逻辑解决了最核心的问题”—— 没有复杂的数学推导,只靠 “两个偏差 + 一个公式”,就让小车能稳定跟踪路径。
如果你是自动驾驶新手,想从路径跟踪算法入门,Stanley 绝对是值得优先学习的方案。试着用仿真实现它,再和 PurePursuit 对比一下两者的跟踪效果,你会对 “路径跟踪” 的理解更深一层~

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









