




 本文详细介绍了如何在ROS环境中查找并获取真实机器人位置信息的方法。通过使用rosmsg和rostopic命令,确定了位置信息的消息类型为nav_msgs/Odometry,并最终找到了tiago机器人的实时位置反馈话题/mobile_base_controller/odom。
本文详细介绍了如何在ROS环境中查找并获取真实机器人位置信息的方法。通过使用rosmsg和rostopic命令,确定了位置信息的消息类型为nav_msgs/Odometry,并最终找到了tiago机器人的实时位置反馈话题/mobile_base_controller/odom。
真实的机器人的位置的话题和仿真器里的话题不一样,需要自己查找。
首先利用rosmsg找到有多少个消息
rosmsg list
接下来确定位置信息的消息类型为nav_msgs/Odometry,感觉只要和位置有关,要么是Odometry要么就是pose。
接下来利用rostopic find 命令找到使用这个消息类型的话题
rostopic find nav_msgs/Odometry
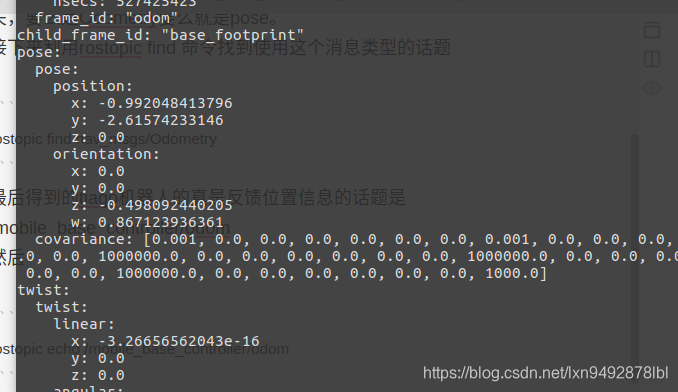
最后得到的tiago机器人的真是反馈位置信息的话题是
/mobile_base_controller/odom
然后
rostopic echo /mobile_base_controller/odom
就可以查看话题的内容,也即是位置的信息。

















 69
69

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









