




 本文详细介绍了如何使用Cartographer SLAM系统构建自定义地图的过程。包括修改配置文件以匹配个人激光雷达数据集,调整坐标系设置,运行代码生成地图,以及如何保存和转换地图数据为常见格式。
本文详细介绍了如何使用Cartographer SLAM系统构建自定义地图的过程。包括修改配置文件以匹配个人激光雷达数据集,调整坐标系设置,运行代码生成地图,以及如何保存和转换地图数据为常见格式。
用catrographer跑自己的数据集
1、更改demo_revo_lds.launch和revo_lds.lua
1.1 修改demo_revo_lds.launch
原本的demo_revo_lds.launch为
<launch>
<param name="/use_sim_time" value="true" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename revo_lds.lua"
output="screen">
<remap from="scan" to="scan" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
<node name="playbag" pkg="rosbag" type="play"
args="--clock $(arg bag_filename)" />
</launch>
其中我们要修改的是
<remap from="scan" to="scan" />
将其改成我们自己的激光数据集里面的激光雷达发布的topic,我的为/sick_scan,因为我把这里改成
<remap from="scan" to="sick_scan" />
其他的都不动
1.1 修改revo_lds.lua
原来的代码有有一段代码为
map_frame = "map",
tracking_frame = "laser",
published_frame = "laser",
odom_frame = "odom",
将其进行修改,针对tracking_frame和published_frame,将他们改成自己的数据集里面的激光slam中激光topic的坐标名称
注意这里的坐标名称可以通过
rosrun rqt_tree rqt_tree
来进行查看,注意了必须和rqt_tree里面的一样才行,这里不是topic,还是topic的坐标名称
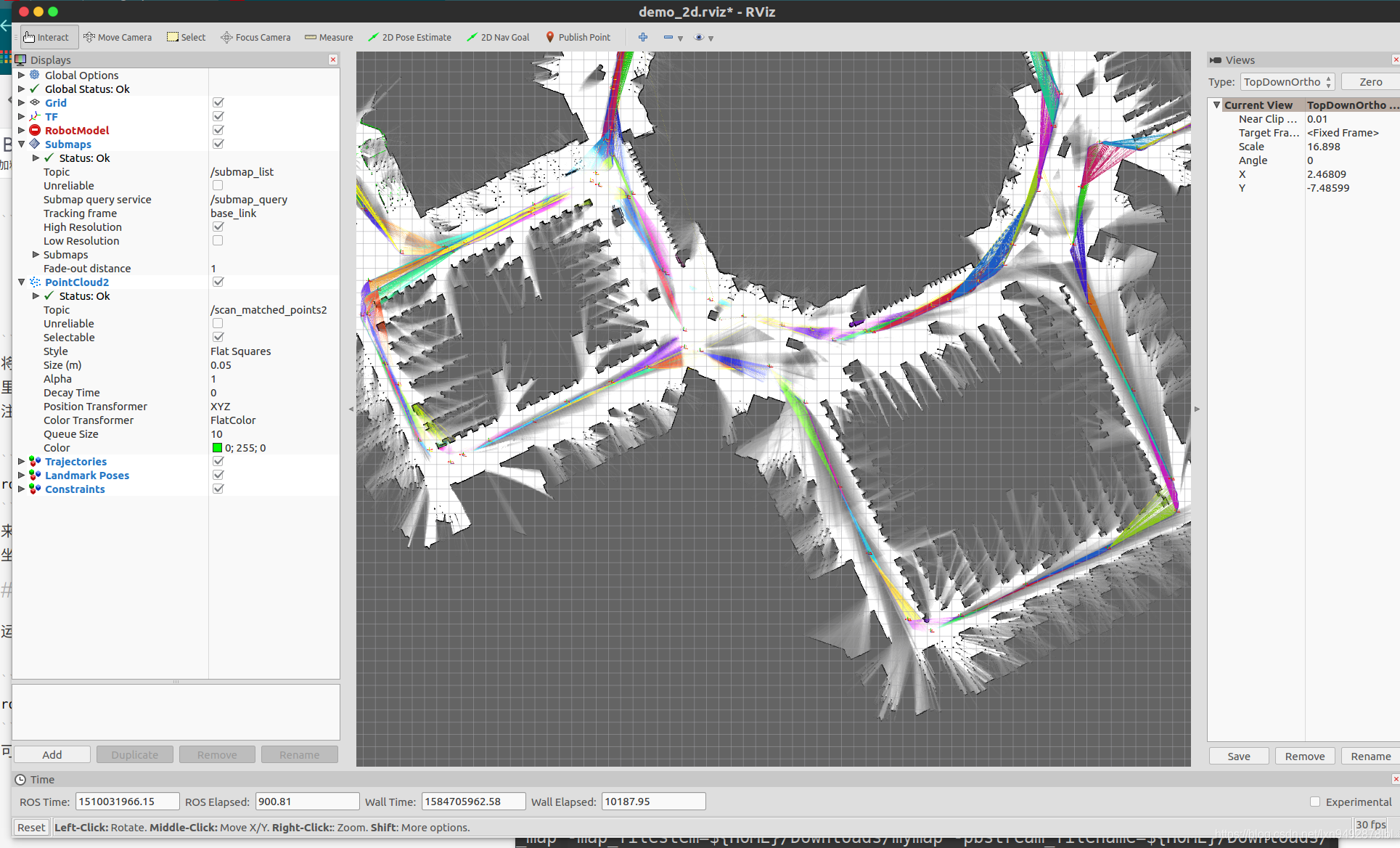
2、运行代码
运行代码
roslaunch cartographer_ros demo_revo_lds.launch
可以看到地图
3、保存地图
序列化保存其当前状态
rosservice call /write_state "{filename: '${HOME}/Downloads/mymap.pbstream'}"
将pbstream转换为pgm和yaml
rosrun cartographer_ros cartographer_pbstream_to_ros_map -map_filestem=${HOME}/Downloads/mymap -pbstream_filename=${HOME}/Downloads/mymap.pbstream -resolution=0.05


















 2557
2557

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









