



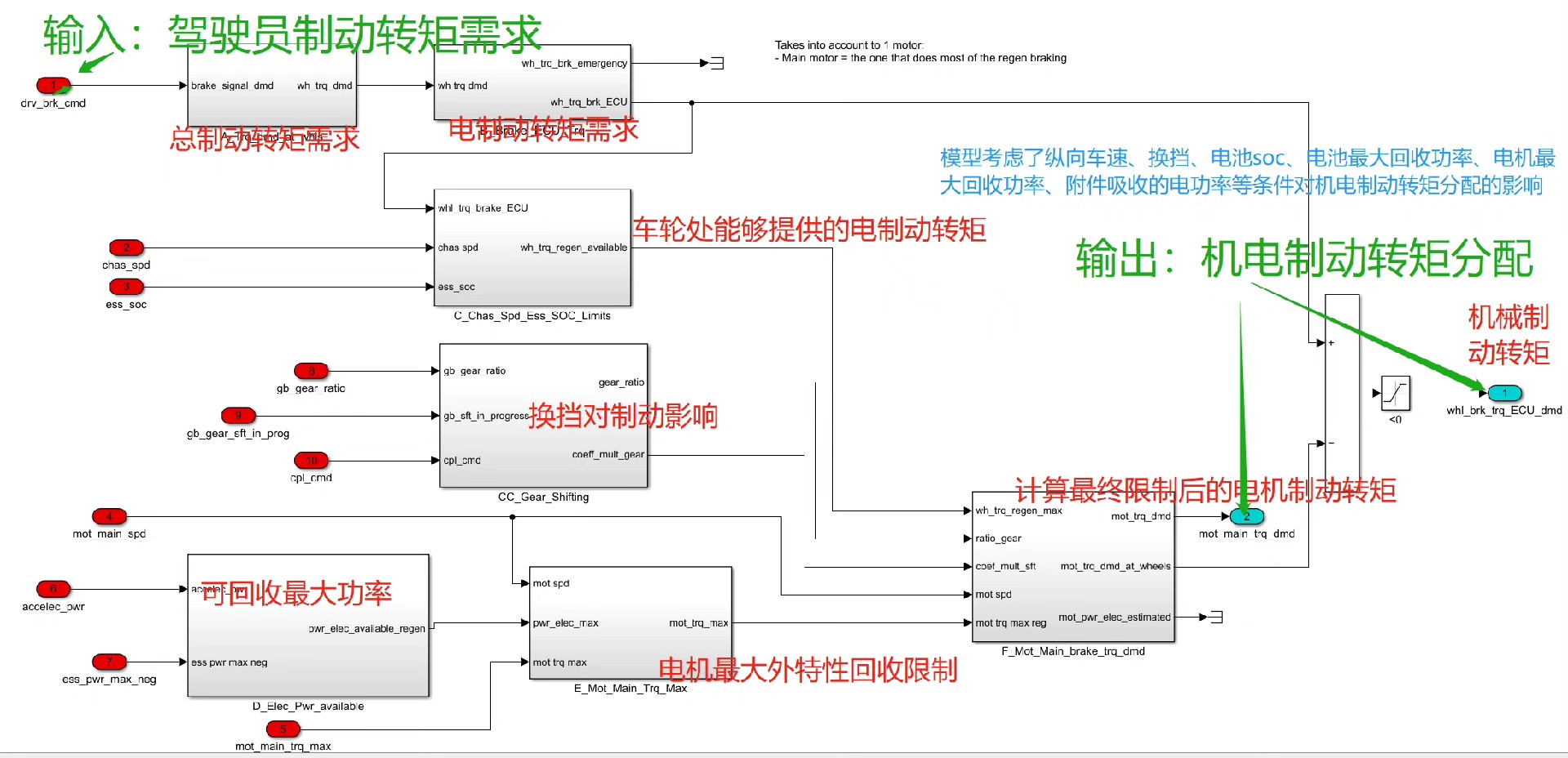
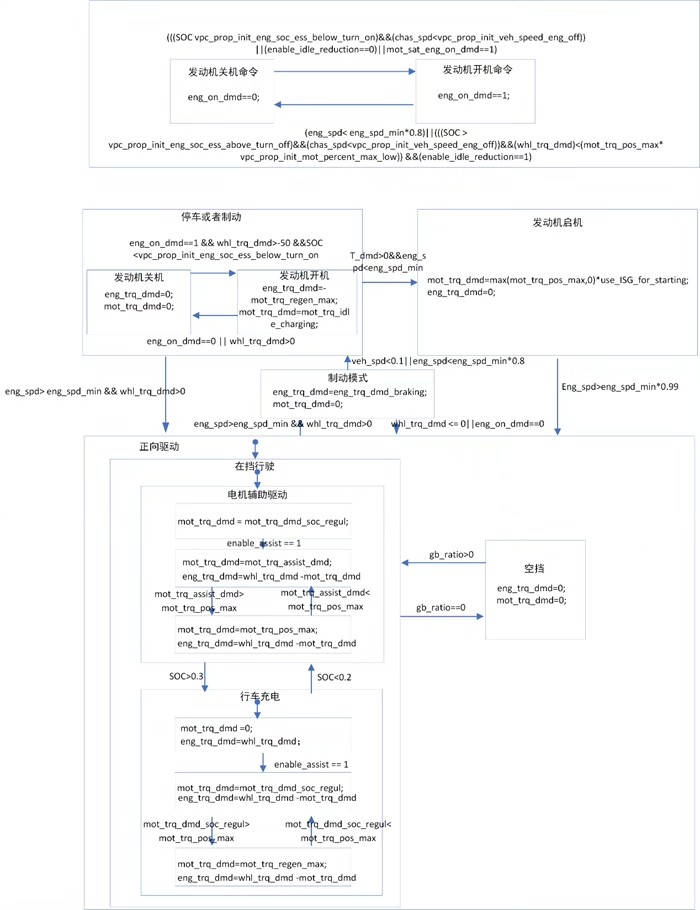
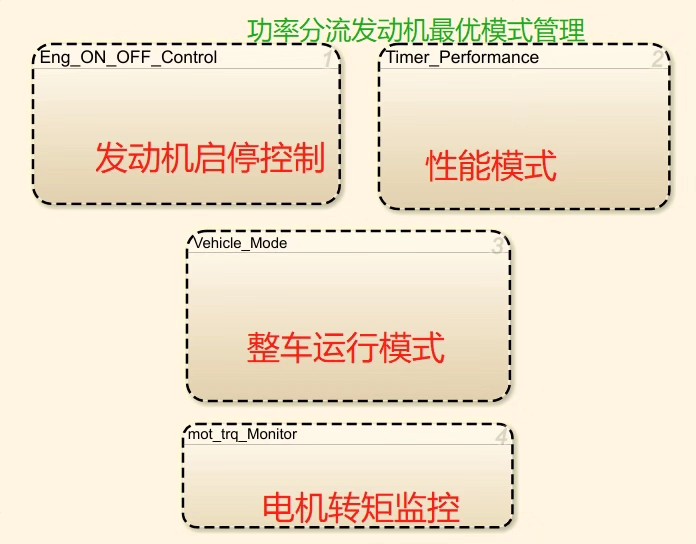
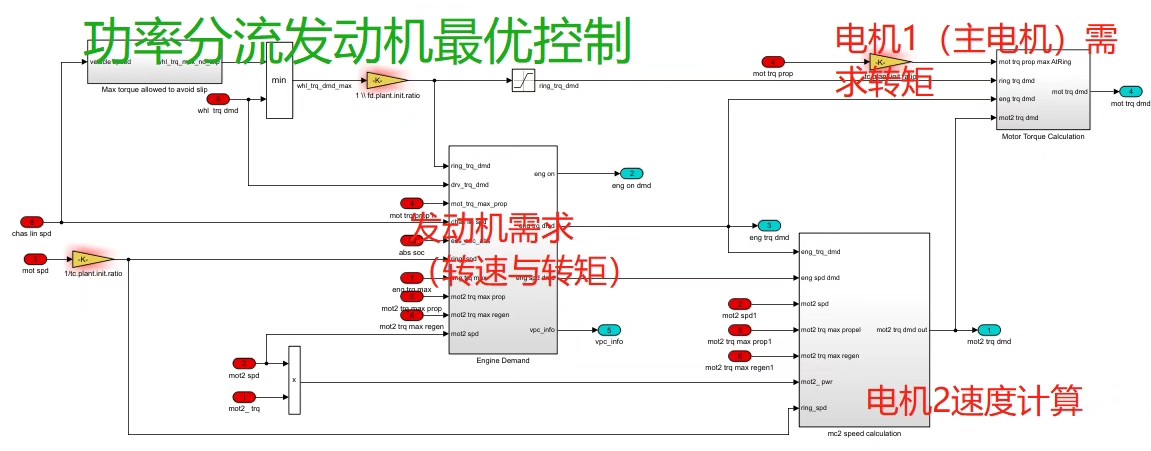
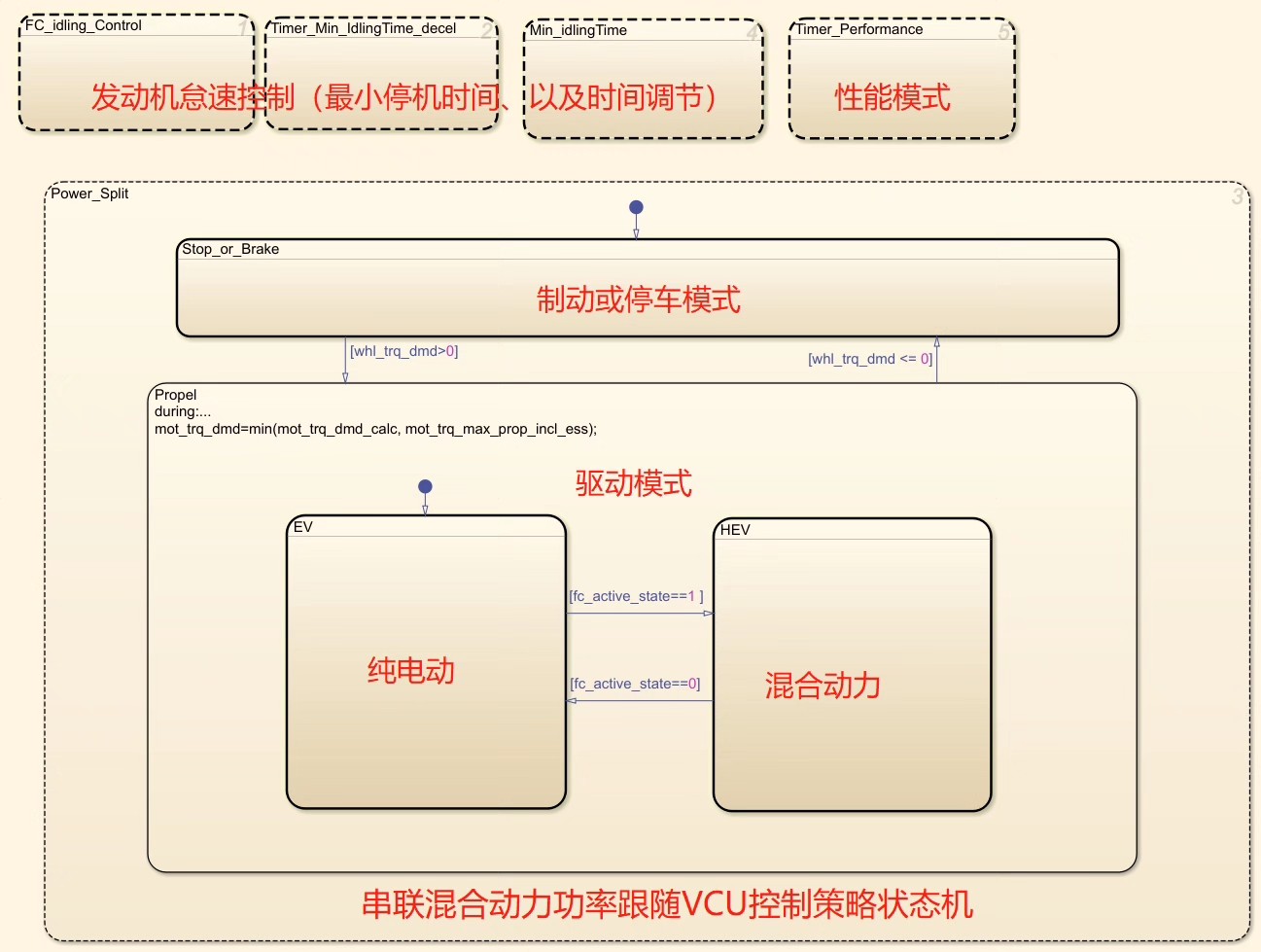
混合动力汽车整车控制策略(VCU)仿真分析,全部基于规则的控制方法,包含串联功率跟随控制,并联电助力控制,混联发动机最优控制策略。 VCU通过接收来自整车、驾驶员、环境的信号进行决策,最后将三部分控制信号通过综合决策模块输出给整车关键部件。 整个VCU分为驱动控制与制动控制。 对于驱动控制,根据整车驱动系统构型,将来自驾驶员、电机、电池、发动机、发电机、电气附件、机械附件等部件的反馈信号进行参数计算和逻辑判断,然后利用Stateflow状态机对整车模式进行管理,最终输出发动机、电机、发电机等的关键控制信号。 对于制动控制,针对整车的制动系统模型(电制动和机械制动),根据来自驾驶员、整车、电机、电池、发动机、变速器等部件的反馈信号进行参数计算,综合考虑电机的制动能量回收控制,最终输出制动转矩需求信号。
油门踩下瞬间,混合动力汽车的VCU控制逻辑像蜘蛛网般展开。仪表盘指针跳动的背后,是Stateflow状态机在0.1秒内完成的17次模式切换决策。我们拆解这套规则控制体系,发现三组典型策略在暗中角力。
串联模式下的电量博弈
当电池SOC低于30%,发动机带着发电机化身移动充电宝。MATLAB代码里藏着这样的功率跟随逻辑:
function engine_power = series_power_control(SOC, demand_power)
persistent last_engine_rpm;
if isempty(last_engine_rpm)
last_engine_rpm = 1500; % 初始转速
end
if SOC < 0.3
target_power = demand_power * 1.2 + 5000; % 功率需求放大系数
engine_rpm = interp1([0 50 100], [1500 2500 3000], target_power/1000);
engine_rpm = smooth_rpm(engine_rpm, last_engine_rpm);
last_engine_rpm = engine_rpm;
engine_power = lookup_engine_map(engine_rpm); % 查万有特性曲线
else
engine_power = 0;
end
end这段代码暴露了工程师的小心机——故意放大的功率需求系数让发动机提前储备电能,就像老司机在爬坡前故意降档补油。smooth_rpm函数里藏着的二阶滤波算法,避免了转速突变带来的闯动感。
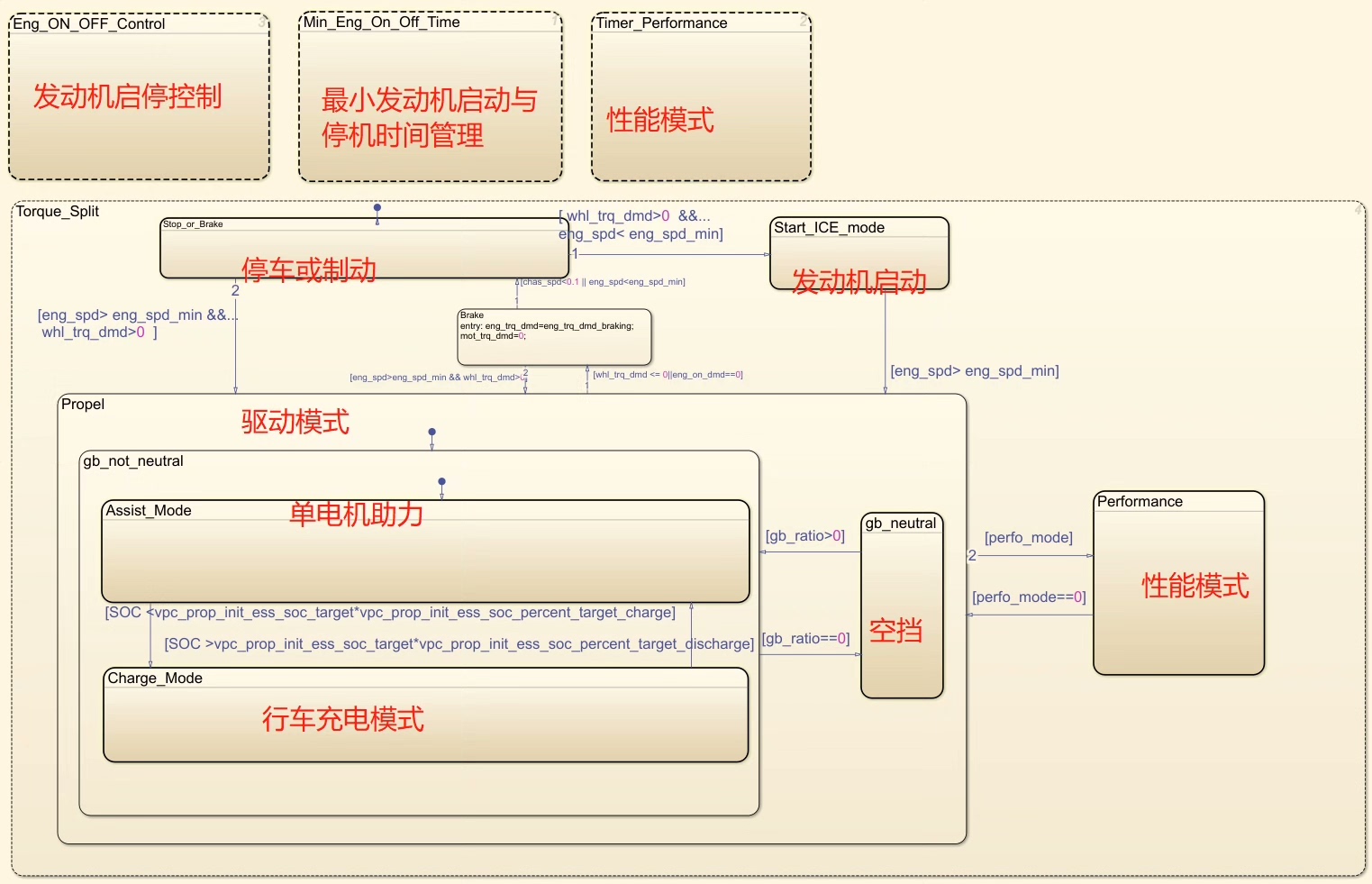
并联模式中的扭矩暗战
急加速时电机瞬间爆发的300Nm扭矩背后,是场精密的数字游戏。看这段扭矩分配代码:
def torque_split(accel_pedal, engine_map, motor_max):
req_torque = pedal_map(accel_pedal) # 踏板开度映射
engine_opt = bisect(lambda x: x*0.8 + 50, req_torque) # 找发动机最佳工作点
if req_torque <= engine_opt + motor_max*0.3:
motor_tq = req_torque - engine_opt*0.7
engine_tq = engine_opt*0.7
else:
motor_tq = motor_max
engine_tq = req_torque - motor_max
return clamp(engine_tq, 0, 180), clamp(motor_tq, 0, 300)bisect函数在发动机万有特性曲线上玩二分查找,0.7的扭矩衰减系数暴露了工程师对NVH的妥协。当需求扭矩突破临界值时,电机直接拉满的暴力美学背后,藏着电池管理系统的冷汗。
混联模式下的油耗谜题
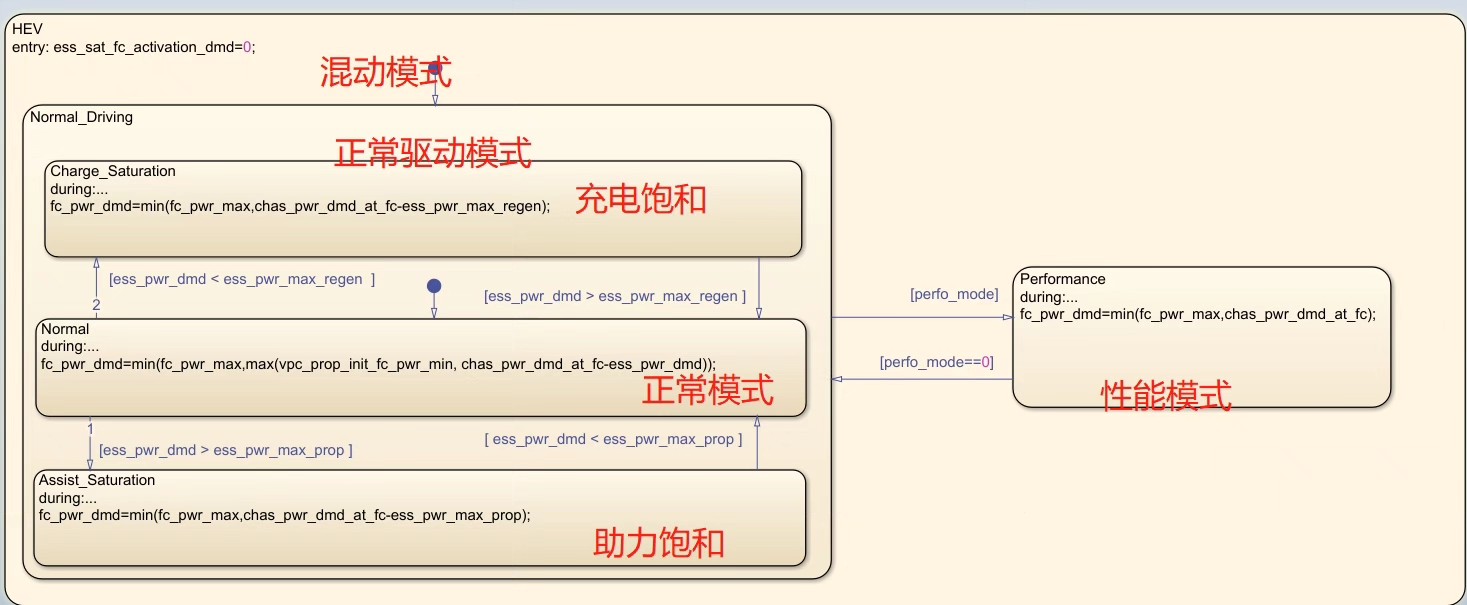
发动机最优控制不是简单的查表游戏。看这段实时优化的核心片段:
float optimal_engine_speed(float vehicle_speed, float battery_power) {
static float last_speed = 2000.0f;
float candidate[3] = {1800, 2200, 2500};
float min_cost = FLT_MAX;
float best_speed = last_speed;
for(int i=0; i<3; i++){
float fuel = engine_model(candidate[i], calc_torque(candidate[i]));
float elec_cost = battery_power > 0 ? 0.2 : 0.15;
float total_cost = fuel + elec_cost * abs(battery_power);
if(total_cost < min_cost){
min_cost = total_cost;
best_speed = candidate[i];
}
}
return low_pass_filter(best_speed, last_speed, 0.3f);
}这个遍历三组候选转速的简化算法,暴露了车载ECU的算力局限。0.2和0.15的电能成本系数,暗示着不同SOC状态下的价值取向。低通滤波器让转速变化像太极拳般圆润,避免了转速频繁跳变的尴尬。
制动控制模块里,能量回收与机械制动的博弈更显黑色幽默。当检测到刹车踏板开度超过65%,电制动开始悄悄退场——不是不想多回收能量,而是怕制动电机过热引发保护机制。扭矩请求信号生成函数里,藏着这样的条件判断:
if brake_pedal > 0.65 && motor_temp < 120
regen_torque = min(brake_demand * 350, battery_max_regen);
elseif brake_pedal > 0.65
regen_torque = battery_max_regen * 0.5;
hydraulic_brake = brake_demand - regen_torque/350;
end这个350的魔术数字,实则是电机峰值扭矩与制动踏板行程的换算系数。当电机温度逼近安全阈值,回收扭矩自动打五折的操作,像极了人类运动员的自我保护本能。
VCU的决策逻辑里,每个数值背后都藏着妥协的艺术。0.3秒的响应延迟不是技术瓶颈,而是故意留出的安全余量;15%的扭矩冗余不是计算失误,而是给离合器接合留出的缓冲空间。这些看似笨拙的规则背后,是无数个失控边缘的测试数据堆砌出的生存智慧。

















 385
385

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









