



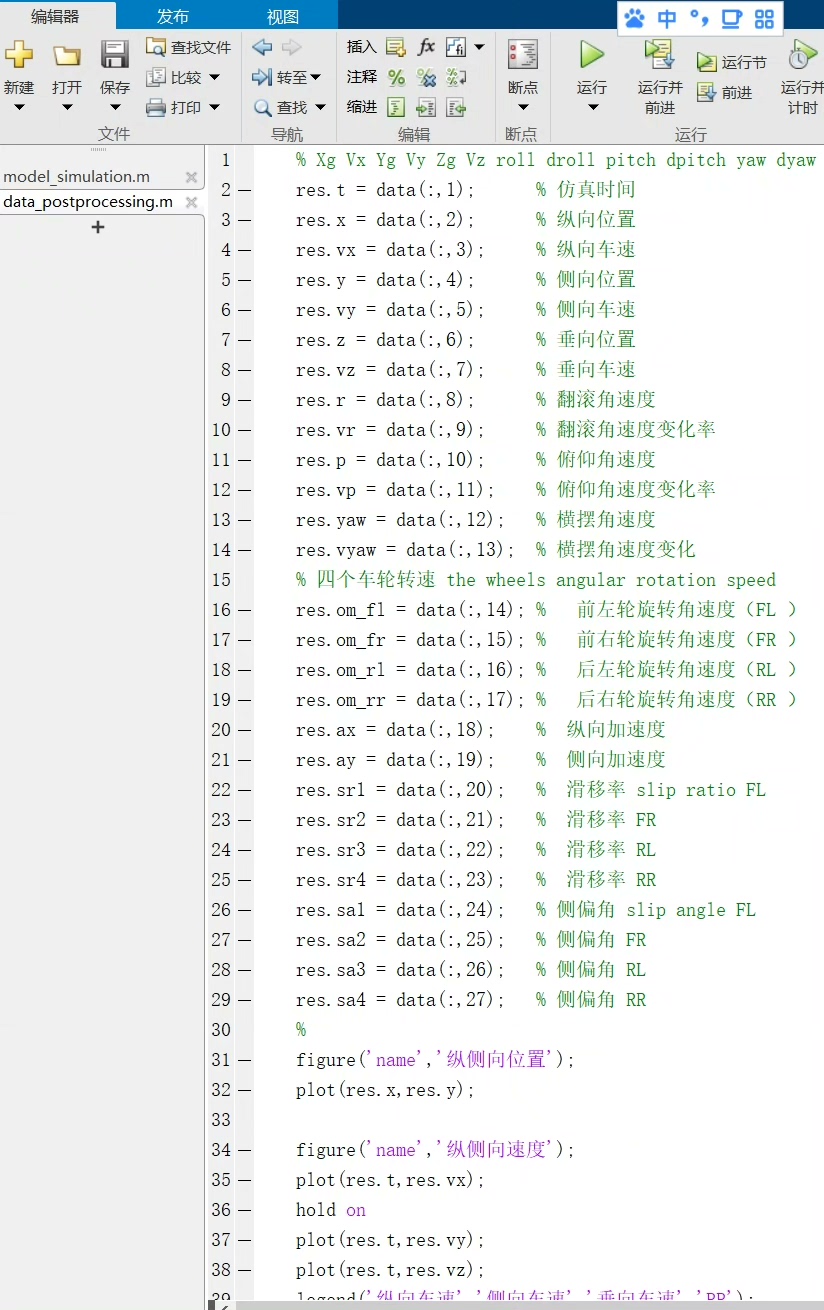
基于C语言的车辆动力学建模,在visual studio中编写多自由度的建模程序,包含纵向,侧向,垂向运动,横摆运动,以及翻滚运动,四个车轮的转动。 除了输出这几个自由度的状态以外,还可输出纵向位置,侧向位置,四个车轮的滑移率,侧偏角等。 另外,在C语言模型的基础上,可将仿真得到的数据传递给python或者matlab,供其他画图,深度学习或者其他高级语言调用。
在汽车工程领域,车辆动力学建模是理解和优化车辆性能的关键。今天咱就用 C 语言在 Visual Studio 里实现一个多自由度的车辆动力学建模程序,涵盖纵向、侧向、垂向运动,横摆运动、翻滚运动以及四个车轮的转动,还能输出各种有用信息,最后把仿真数据传递给 Python 或 Matlab 做进一步处理。
多自由度建模的基本思路
要实现多自由度建模,我们得把车辆运动拆分成几个关键部分,每个部分对应一个自由度。然后通过物理公式和运动学方程来描述这些运动。
代码实现
首先,我们来定义一些基本的结构体,用于存储车辆的状态信息。以下是一个简单的 C 语言代码示例:
#include <stdio.h>
// 定义车辆状态结构体
typedef struct {
// 纵向、侧向、垂向速度
double vx, vy, vz;
// 横摆、翻滚角速度
double omega_yaw, omega_roll;
// 四个车轮角速度
double wheel_omega[4];
// 纵向、侧向位置
double x, y;
// 四个车轮滑移率
double wheel_slip[4];
// 四个车轮侧偏角
double wheel_alpha[4];
} VehicleState;
// 初始化车辆状态
void init_vehicle_state(VehicleState *state) {
state->vx = 0.0;
state->vy = 0.0;
state->vz = 0.0;
state->omega_yaw = 0.0;
state->omega_roll = 0.0;
for (int i = 0; i < 4; i++) {
state->wheel_omega[i] = 0.0;
state->wheel_slip[i] = 0.0;
state->wheel_alpha[i] = 0.0;
}
state->x = 0.0;
state->y = 0.0;
}
// 主函数
int main() {
VehicleState vehicle;
init_vehicle_state(&vehicle);
// 这里可以添加更多的动力学计算代码
printf("Initial vehicle state:\n");
printf("Longitudinal velocity: %.2f m/s\n", vehicle.vx);
printf("Lateral velocity: %.2f m/s\n", vehicle.vy);
// 可以继续输出其他状态信息
return 0;
}代码分析
在这段代码里,我们定义了一个 VehicleState 结构体,把车辆的各种状态信息都整合在一起,方便管理和使用。initvehiclestate 函数的作用是初始化车辆的状态,让所有状态变量都从 0 开始。在 main 函数中,我们创建了一个 VehicleState 类型的变量 vehicle,并调用 initvehiclestate 函数对其进行初始化,最后简单输出了车辆的纵向和侧向速度。
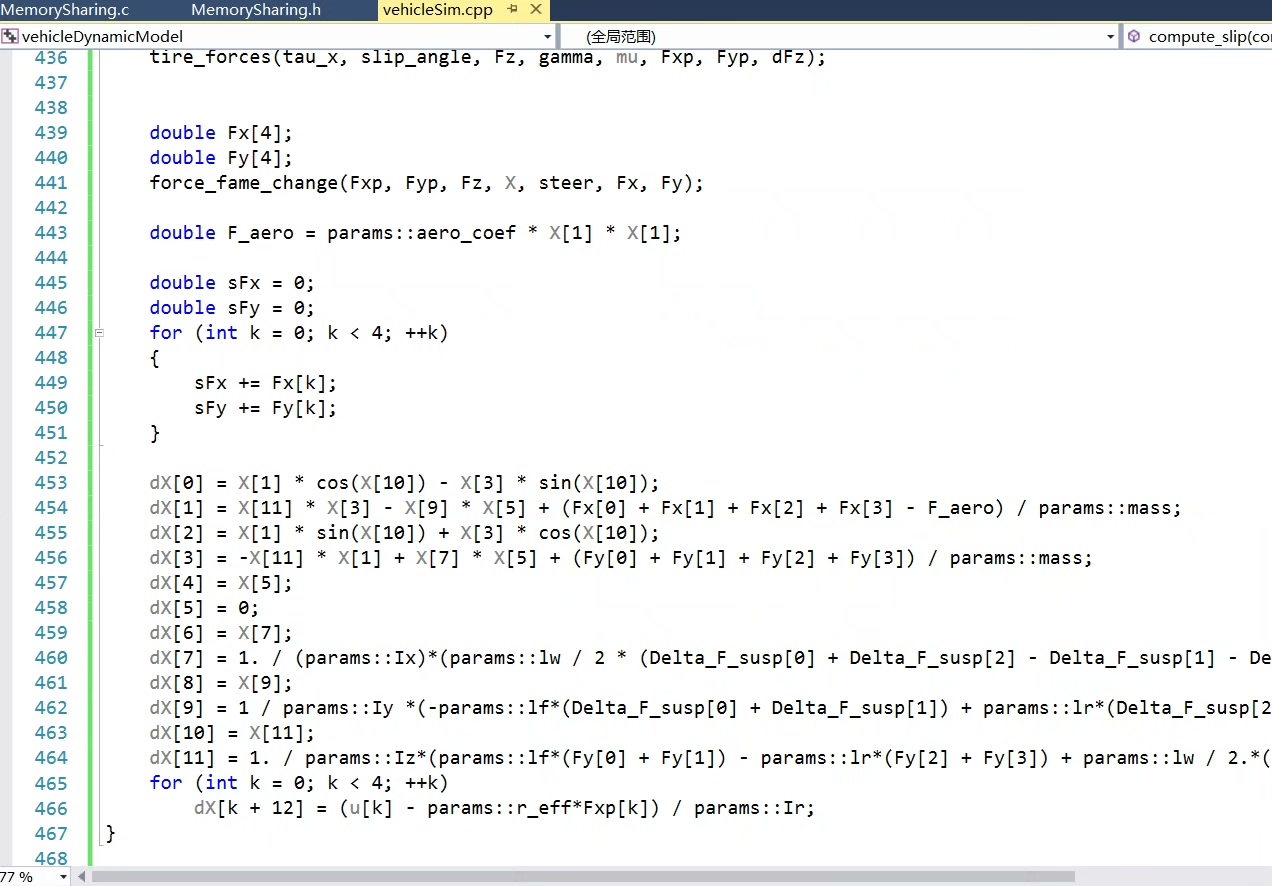
动力学计算
接下来,我们要加入具体的动力学计算代码,来模拟车辆的各种运动。这部分代码会稍微复杂一些,因为要考虑到很多物理因素。
// 简单的纵向动力学计算示例
void longitudinal_dynamics(VehicleState *state, double throttle, double brake) {
double mass = 1500.0; // 车辆质量
double force = throttle * 1000.0 - brake * 500.0; // 纵向力
double acceleration = force / mass;
state->vx += acceleration * 0.1; // 假设时间步长为 0.1s
state->x += state->vx * 0.1;
}
// 在 main 函数中调用纵向动力学计算
int main() {
VehicleState vehicle;
init_vehicle_state(&vehicle);
double throttle = 0.5;
double brake = 0.0;
longitudinal_dynamics(&vehicle, throttle, brake);
printf("Updated longitudinal velocity: %.2f m/s\n", vehicle.vx);
printf("Longitudinal position: %.2f m\n", vehicle.x);
return 0;
}代码分析
这里的 longitudinaldynamics 函数模拟了车辆的纵向动力学。我们先根据油门和刹车输入计算出纵向力,再用牛顿第二定律算出加速度,最后更新车辆的纵向速度和位置。在 main 函数中,我们设置了油门和刹车的值,并调用 longitudinaldynamics 函数进行计算,最后输出更新后的纵向速度和位置。
数据传递给 Python 或 Matlab
完成 C 语言的建模和仿真后,我们可以把数据传递给 Python 或 Matlab 做进一步处理,比如画图或深度学习。这里以 Python 为例,我们可以把数据保存到文件中,然后用 Python 读取。
// 将车辆状态保存到文件
void save_state_to_file(VehicleState *state, const char *filename) {
FILE *file = fopen(filename, "w");
if (file != NULL) {
fprintf(file, "%.2f %.2f %.2f %.2f %.2f\n", state->vx, state->vy, state->vz, state->omega_yaw, state->omega_roll);
for (int i = 0; i < 4; i++) {
fprintf(file, "%.2f %.2f %.2f\n", state->wheel_omega[i], state->wheel_slip[i], state->wheel_alpha[i]);
}
fprintf(file, "%.2f %.2f\n", state->x, state->y);
fclose(file);
}
}
// 在 main 函数中调用保存函数
int main() {
VehicleState vehicle;
init_vehicle_state(&vehicle);
double throttle = 0.5;
double brake = 0.0;
longitudinal_dynamics(&vehicle, throttle, brake);
save_state_to_file(&vehicle, "vehicle_state.txt");
return 0;
}代码分析
savestatetofile 函数把车辆的状态信息保存到一个文本文件中。在 main 函数中,我们调用这个函数把更新后的车辆状态保存到 vehiclestate.txt 文件里。
接下来是 Python 读取文件的代码:
import numpy as np
import matplotlib.pyplot as plt
# 读取文件
data = np.loadtxt('vehicle_state.txt')
# 提取纵向速度
vx = data[0]
# 画图
plt.plot([vx], [0], 'ro')
plt.xlabel('Longitudinal velocity (m/s)')
plt.title('Vehicle longitudinal velocity')
plt.show()代码分析
这段 Python 代码读取了 C 语言保存的文件,提取了纵向速度并画了一个简单的图。这样,我们就实现了从 C 语言模型到 Python 的数据传递和可视化。
通过以上步骤,我们用 C 语言在 Visual Studio 里实现了一个多自由度的车辆动力学建模程序,并把仿真数据传递给 Python 进行处理。这个程序还有很多可以优化和扩展的地方,比如加入更复杂的动力学模型、实现更多自由度的计算等。希望这篇文章能给大家在车辆动力学建模方面带来一些启发。

















 1620
1620

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









