



前车碰撞预警——FCW,基于深度学习和单目摄像头测距的前车碰撞预警源码。 单目测距,多目标跟踪。 车辆检测,智能adas,FCW,价格只包括源码及设计文档讲解。 我使用的版本说明: gpu版本: anoconda:3-5.1.0 cuda:10.0 cudnn: cudnn-10.0-windows10-x64-v7.6.5.32 tensorflow-gpu: 1.14.0 opencv: 4.2.0 keras:2.2.5 cpu版本: anoconda:3-5.1.0 tensorflow: 1.14.0 opencv: 4.2.0 keras:2.2.5
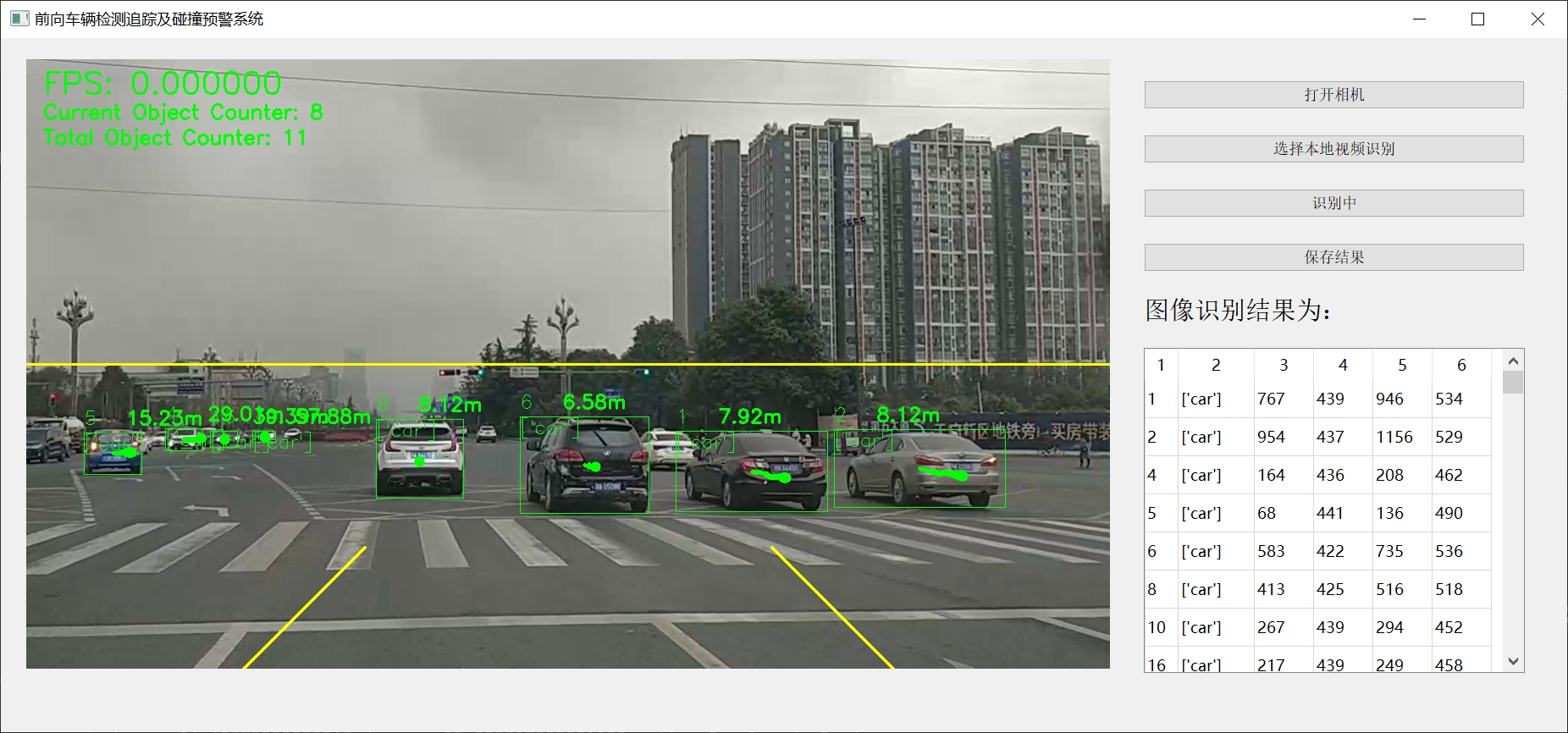
在智能驾驶领域,前车碰撞预警(FCW)是一项至关重要的技术,它就像是给车辆安装了一双时刻警惕的眼睛,能提前感知潜在危险,为驾驶者争取宝贵的反应时间。今天就来聊聊基于深度学习和单目摄像头测距的FCW源码相关内容。
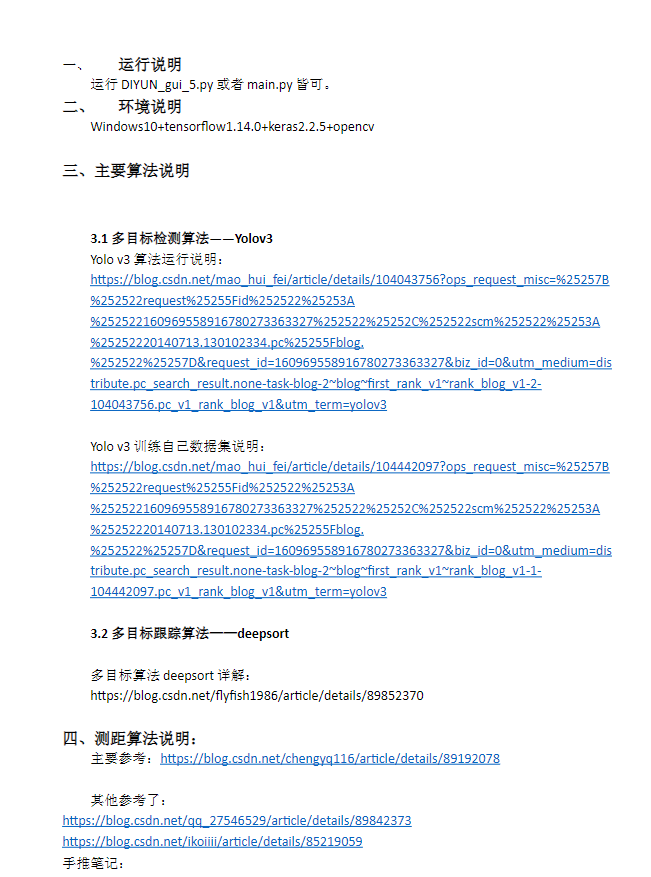
技术要点概述
这项技术主要涉及单目测距、多目标跟踪以及车辆检测,是智能adas系统的关键部分。单目测距利用单目摄像头获取的图像信息,通过算法来估算目标车辆与本车的距离。多目标跟踪则是在复杂的交通场景中,实时追踪多个车辆目标的运动轨迹。车辆检测就是识别出图像中的车辆。
版本说明的重要性
先说说版本问题,不同的软件版本之间可能存在兼容性差异,这在深度学习开发中尤为关键。
GPU版本
- anoconda:3 - 5.1.0:Anaconda作为一个强大的Python发行版,集成了众多科学计算库,为项目提供了基础的运行环境。
- cuda:10.0:CUDA是NVIDIA推出的并行计算平台和编程模型,利用GPU的并行计算能力加速深度学习模型的训练和推理。比如在训练复杂的神经网络模型时,使用CUDA能大幅缩短训练时间。以下是一个简单示意代码(实际深度学习训练代码会复杂得多):
import tensorflow as tf
# 假设已经构建好模型model
with tf.device('/GPU:0'):
model.compile(optimizer='adam', loss='categorical_crossentropy')
model.fit(x_train, y_train, epochs = 10, batch_size = 32)这里通过tf.device('/GPU:0')指定模型在GPU上运行,利用CUDA加速计算。
- cudnn: cudnn - 10.0 - windows10 - x64 - v7.6.5.32:cuDNN是NVIDIA针对深度神经网络的加速库,配合CUDA进一步提升深度学习性能。它针对卷积神经网络等常见操作进行了优化,使得计算更加高效。
- tensorflow - gpu: 1.14.0:TensorFlow是深度学习领域广泛使用的框架,GPU版本能充分利用CUDA和cuDNN的优势。
- opencv: 4.2.0:OpenCV用于处理摄像头图像,比如图像的读取、预处理等操作。以下代码展示如何使用OpenCV读取摄像头图像:
import cv2
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
if not ret:
break
cv2.imshow('Camera Feed', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()- keras:2.2.5:Keras是一个简洁的高级神经网络API,基于TensorFlow等后端运行,让构建和训练神经网络变得更加容易。例如构建一个简单的全连接神经网络:
from keras.models import Sequential
from keras.layers import Dense
model = Sequential()
model.add(Dense(64, activation='relu', input_dim = 100))
model.add(Dense(10, activation='softmax'))
model.compile(optimizer='rmsprop', loss='categorical_crossentropy', metrics=['accuracy'])CPU版本
- anoconda:3 - 5.1.0:同样提供基础环境。
- tensorflow: 1.14.0:CPU版本的TensorFlow在没有GPU的情况下也能运行深度学习模型,不过计算速度相对较慢。
- opencv: 4.2.0 和 keras:2.2.5:功能与GPU版本中的作用一致。
值得一提的是,此次提供的价格仅包含源码及设计文档讲解,对于想要深入研究FCW技术,从源码层面理解其实现原理的开发者来说,是个不错的机会。通过研究源码,可以进一步优化算法,提升FCW系统的性能,为智能驾驶的安全保障添砖加瓦。无论是单目测距的算法细节,还是多目标跟踪的逻辑实现,源码中都蕴含着无尽的探索空间。


















 456
456

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









