



基于svpwm的dtc异步电机滑模外环控制。 异步电机直接转矩控制。
最近在研究异步电机控制方面的内容,发现了一种基于SVPWM的DTC异步电机滑模外环控制方法,感觉还挺有意思的,来和大家分享一下😃。
异步电机直接转矩控制(DTC)
异步电机直接转矩控制是一种很经典的控制策略。它直接控制电机的转矩和磁链,通过对逆变器开关状态的实时调整,使得电机能够快速响应给定的转矩指令。简单来说,就是根据电机的转矩和磁链偏差,直接决定逆变器的开关状态,从而实现对电机转矩的快速控制。
在DTC中,转矩和磁链的计算是关键。通常会利用电机的数学模型来计算,这里涉及到一些电机的参数,比如定子电阻、电感等。下面简单写个计算转矩的小代码示例(以简化的模型为例):
% 假设已知的电机参数
Rs = 1; % 定子电阻
Ld = 0.1; % 定子直轴电感
Lq = 0.1; % 定子交轴电感
Psi_s_alpha = 1; % 定子磁链alpha轴分量
Psi_s_beta = 1; % 定子磁链beta轴分量
% 计算转矩
Te = 1.5 * (Ld - Lq) * Psi_s_alpha * Psi_s_beta / Ld;
disp(['计算得到的转矩为:', num2str(Te)]);这段代码就是根据简化的公式来计算异步电机的转矩。通过已知的定子磁链分量和电机参数,按照公式算出转矩值。这里只是简单示意,实际应用中的模型会更复杂精确。
基于SVPWM的改进
传统的DTC虽然简单直接,但存在一些问题,比如转矩脉动较大等。基于SVPWM的改进就应运而生啦。SVPWM(空间矢量脉宽调制)可以有效提高直流母线电压的利用率,减少谐波含量,改善电机的运行性能。
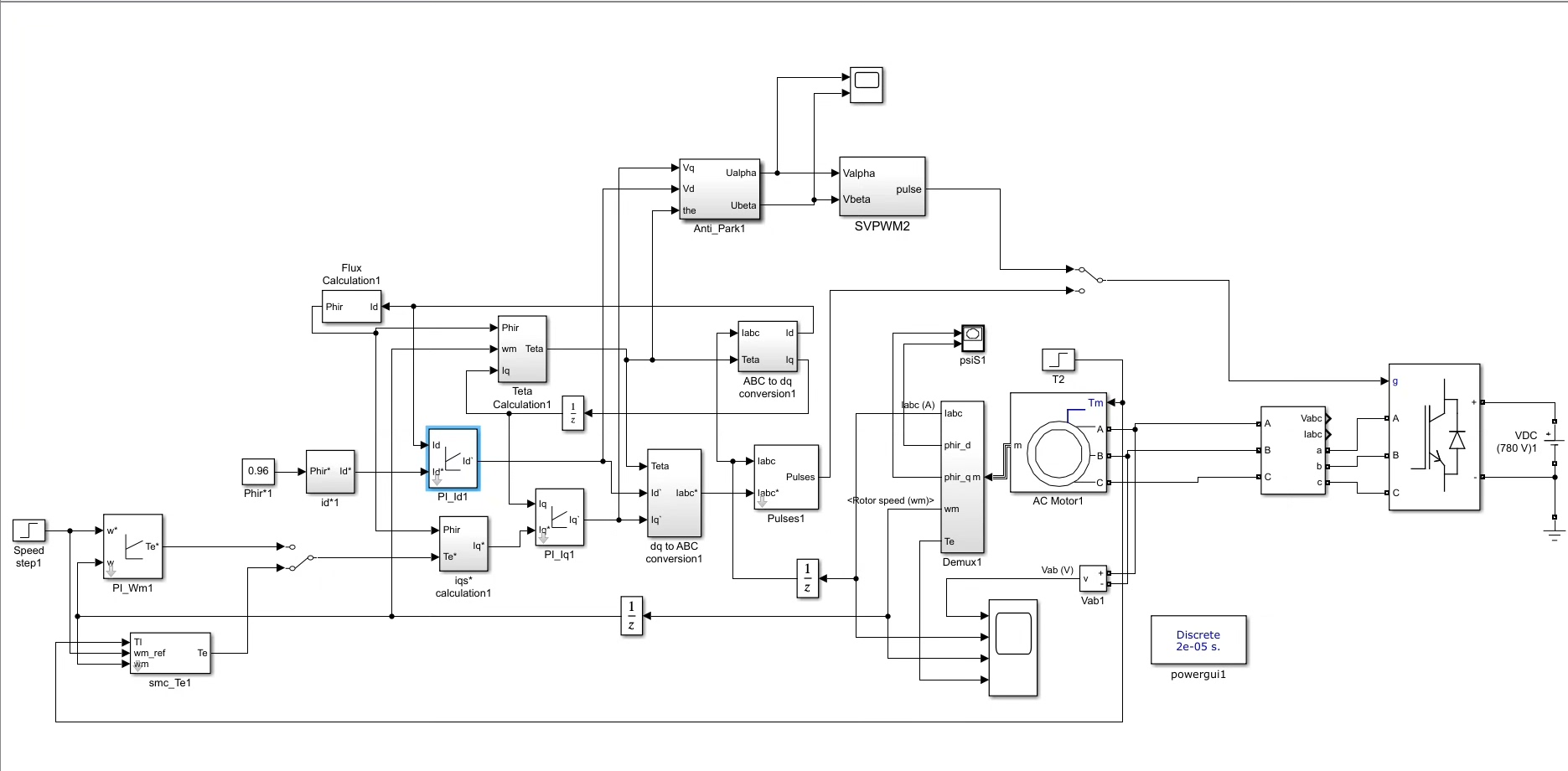
在基于SVPWM的DTC中,首先要根据电机的磁链和转矩偏差确定空间电压矢量。然后通过SVPWM算法来生成逆变器的开关信号。这就需要对空间电压矢量进行复杂的计算和调制。
给个简单的SVPWM基本原理的代码片段(伪代码形式),帮助理解:
# 假设已经计算得到空间电压矢量的幅值和角度
V_ref = 10; # 参考电压矢量幅值
theta_ref = 30; # 参考电压矢量角度
# SVPWM基本原理计算
sector = get_sector(theta_ref); # 根据角度确定所在扇区
T1, T2, T0 = calculate_time(V_ref, sector); # 计算扇区时间
# 这里就可以根据计算得到的T1, T2, T0来生成逆变器的开关信号啦
# 例如通过控制逆变器开关管的导通时间来实现这里的代码示意了根据参考电压矢量的幅值和角度,利用SVPWM原理计算出在不同扇区的时间分配,从而为生成逆变器开关信号做准备。实际的代码实现会涉及到更多细节和对硬件的控制。
滑模外环控制
滑模控制是一种鲁棒控制方法,将其应用到基于SVPWM的DTC异步电机控制中作为外环控制,可以进一步提高系统的鲁棒性和动态性能。
滑模控制的核心思想就是设计一个滑模面,让系统状态沿着这个滑模面趋近于平衡点。通过设计合适的控制律,使得系统在滑模面上快速滑动到平衡点,从而有效抑制外部干扰和参数变化的影响。
这里简单描述下滑模控制律的设计思路(不涉及具体代码实现啦😜):
假设定义一个滑模面函数 s(x),其中 x 是系统状态变量。根据滑模控制理论,控制律一般设计为 u = -K sign(s),其中 K 是一个正定矩阵,sign(s) 是符号函数。通过调整 K 的值,可以控制系统状态在滑模面上的滑动速度和稳定性。
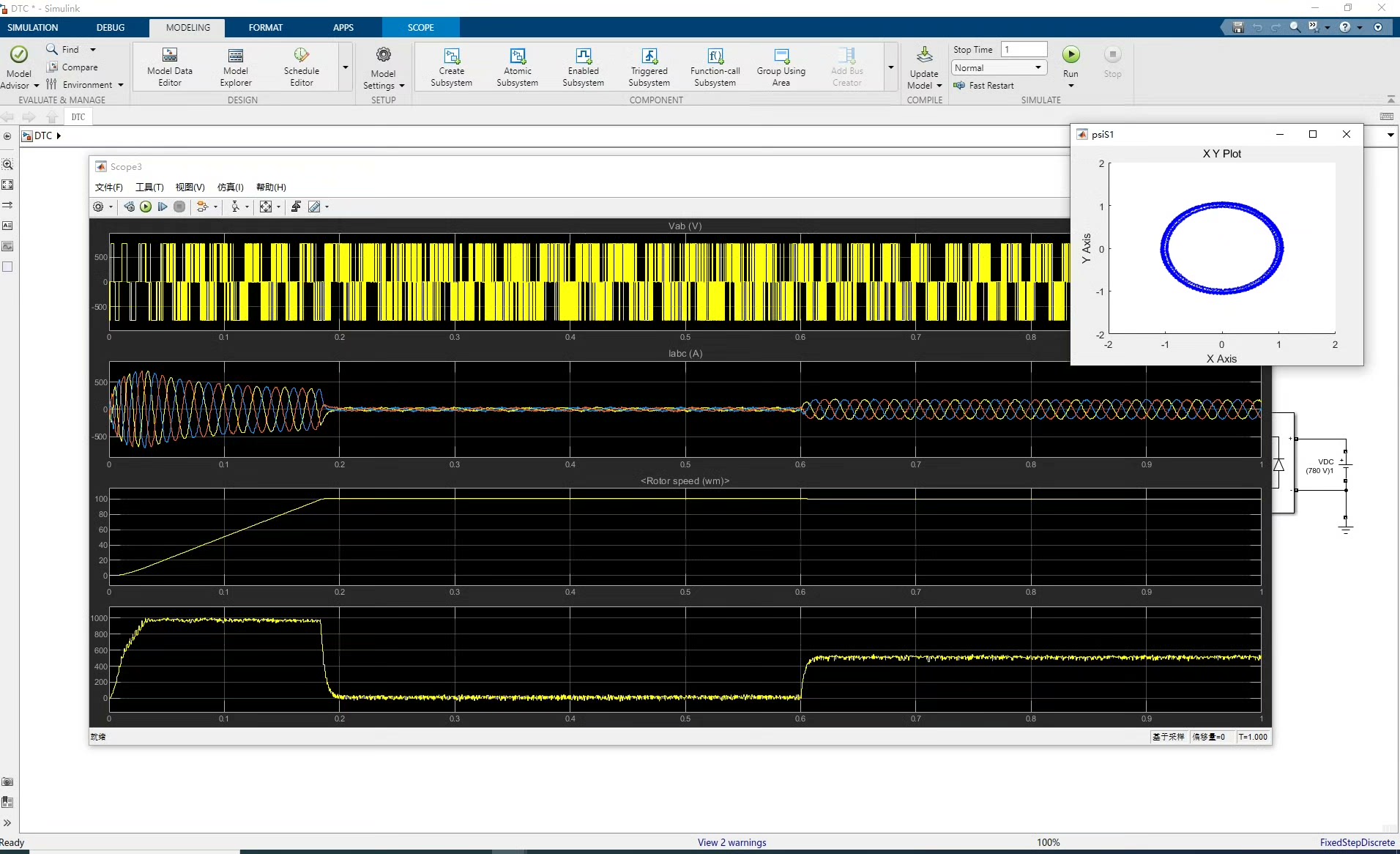
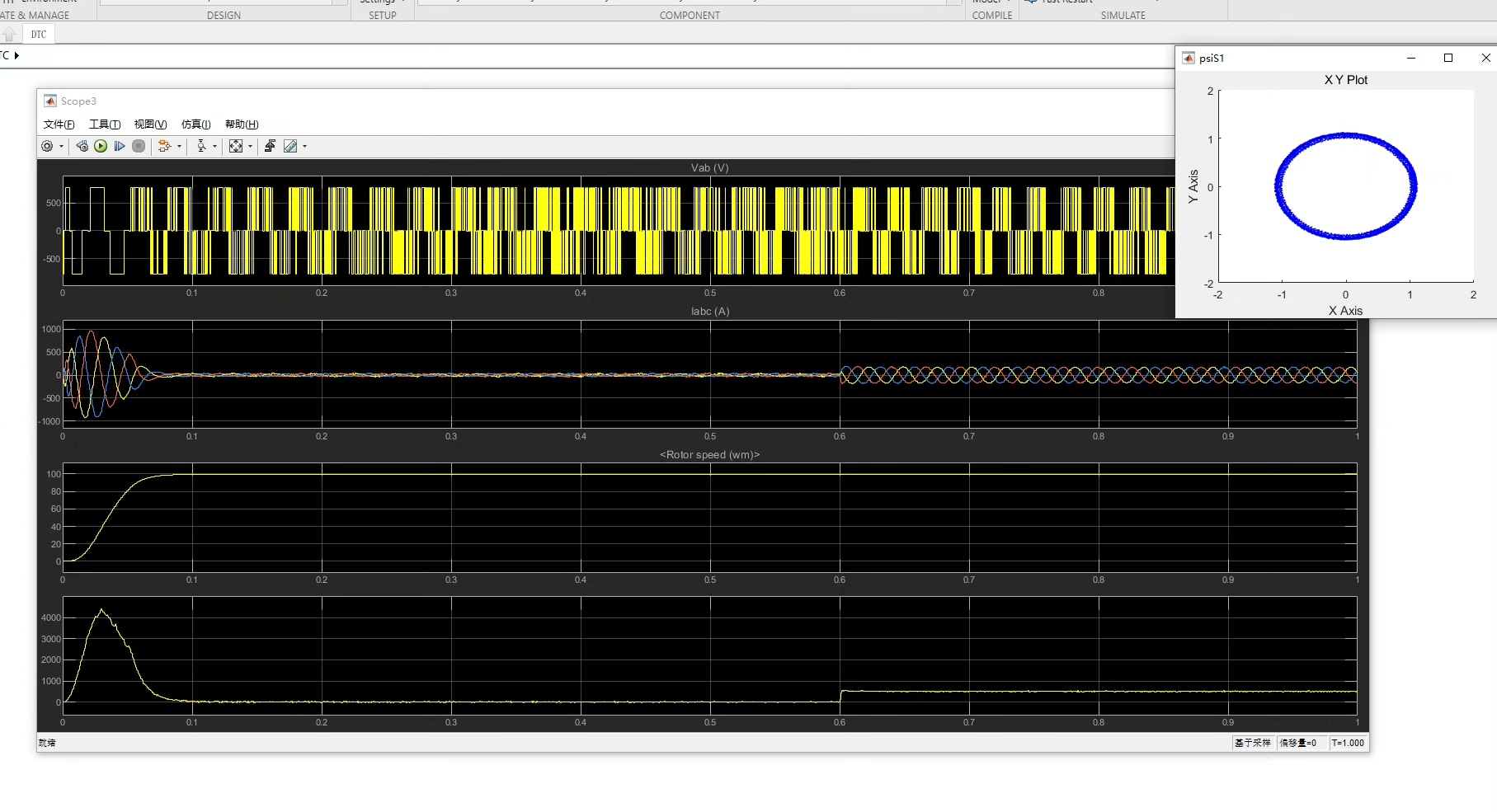
基于SVPWM的DTC异步电机滑模外环控制,结合了SVPWM的优点和滑模控制的鲁棒性,能够让异步电机在各种工况下都有更好的运行表现。希望这篇分享能让大家对这种控制方法有个初步的了解😄。
#异步电机 #直接转矩控制 #SVPWM #滑模控制

















 333
333

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









