



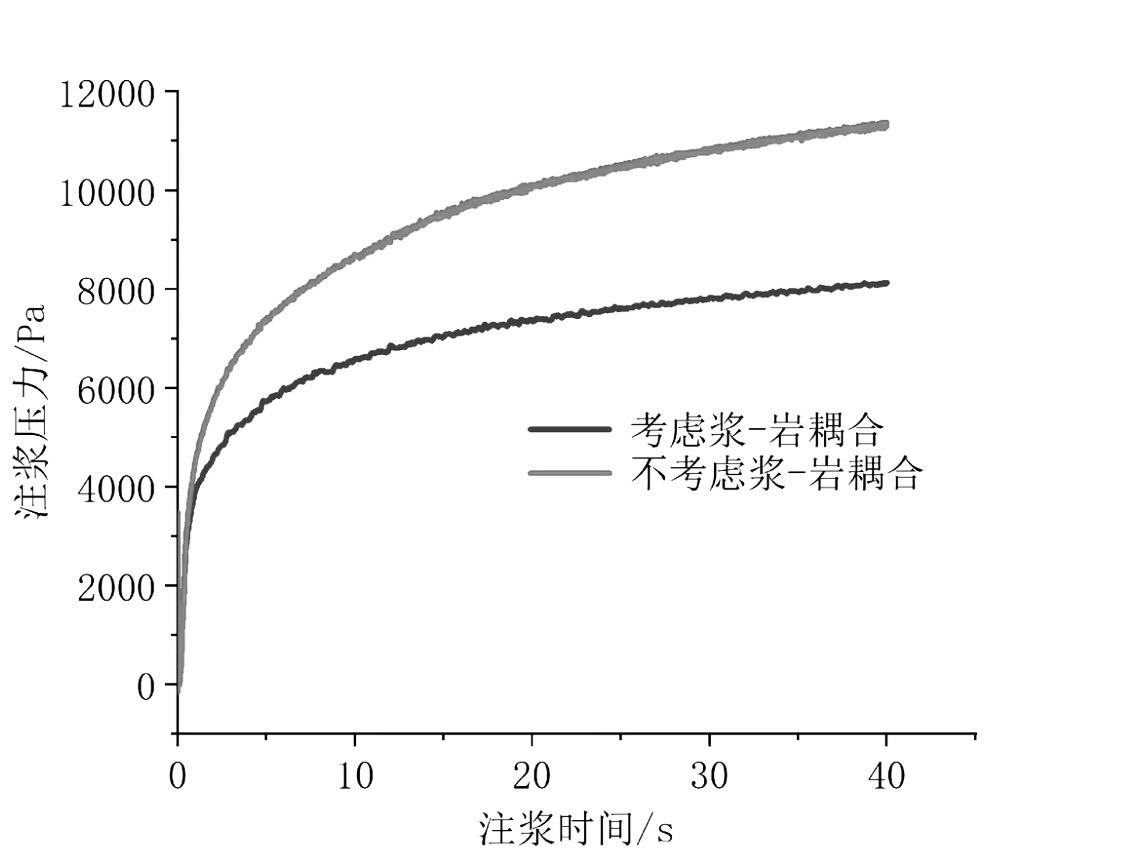
在COMSOL中运用水平集法和蠕动流模块模拟裂隙注浆过程,考虑浆液—岩体的耦合作用。 本算例中,初始时刻裂隙内部只存在水1mPas,然后对裂隙进行长达40秒的注浆,浆液粘度为10mPas。 保持注浆速率不变,注浆压力逐渐增大,符合一般注浆规律。 诚然,由于comsol的收敛较难,在初始时刻注浆压力可能出现数值震荡。
在岩土工程领域,裂隙注浆是一项至关重要的技术,用于加固岩体、封堵渗漏等。而借助 COMSOL 软件,利用水平集法和蠕动流模块来模拟这一过程,能为我们深入理解注浆机制提供有力帮助。今天,就来跟大家分享一下这个有趣的模拟过程。
一、模拟背景
本次模拟旨在考虑浆液 - 岩体的耦合作用下,对裂隙注浆过程进行细致呈现。初始时刻,裂隙内部充满粘度为 1mPas 的水,随后开启长达 40 秒的注浆,注入的浆液粘度为 10mPas 。实际注浆过程中有个普遍规律,就是在保持注浆速率不变时,注浆压力会逐渐增大,这也是我们模拟中需要遵循的重要特性。不过,COMSOL 的收敛一直是个挑战,在初始时刻,注浆压力可能会出现数值震荡。
二、水平集法在模拟中的运用
水平集法在处理复杂界面运动方面有着独特优势。在裂隙注浆模拟里,它可以精准追踪浆液与水之间的界面移动。简单来说,水平集函数定义了一个隐含曲面,界面就在这个曲面上。
% 假设这里有一个简单的水平集函数初始化示例
phi = zeros(size(mesh)); % 初始化水平集函数,mesh 是模拟区域的网格
phi(inside_region) = 1; % 在浆液初始区域内设置水平集函数值为 1
phi(outside_region) = -1; % 在水的区域设置为 -1上述代码只是一个简单示意,实际在 COMSOL 中,水平集法的实现更为复杂。通过这种方式,水平集函数会随着时间和流体的运动不断更新,从而清晰展现浆液在裂隙中的扩散情况。
三、蠕动流模块助力模拟
蠕动流模块适用于低雷诺数流动情况,在裂隙注浆场景中非常契合。低雷诺数意味着粘性力占主导,惯性力相对可忽略。
% 蠕动流控制方程简单示例(示意)
mu_water = 1e - 3; % 水的粘度 1mPas
mu_grout = 1e - 2; % 浆液的粘度 10mPas
rho_water = 1000; % 水的密度
rho_grout = 1200; % 浆液密度
% 假设一个简单的二维流动,速度分量 u 和 v
du_dx = 0;
du_dy = 0;
dv_dx = 0;
dv_dy = 0;
% 压力项 dp
dp_dx = 0;
dp_dy = 0;
% 蠕动流方程在 x 方向(示意)
force_x = -dp_dx + mu_water * (du_dx + du_dx) + mu_grout * (du_dx + du_dx);
% 蠕动流方程在 y 方向(示意)
force_y = -dp_dy + mu_water * (dv_dy + dv_dy) + mu_grout * (dv_dy + dv_dy);实际 COMSOL 中对蠕动流模块的设置包含众多参数和边界条件设置,通过求解这些方程,我们能够准确获得流体在裂隙中的流动速度、压力分布等信息。
四、模拟中的挑战:收敛难题
正如前文提到,COMSOL 收敛较难,尤其是在初始注浆时刻。这时候注浆压力的数值震荡就是收敛困难的一种表现。可能原因包括网格划分不够精细、初始条件设置不够合理等。
为解决这个问题,我们可以尝试细化网格,让模拟区域的离散化更精确。同时,合理调整初始条件,比如给注浆压力设置一个相对平滑的初始过渡值。
五、总结
通过在 COMSOL 中运用水平集法和蠕动流模块模拟裂隙注浆过程,我们能够直观且深入地研究浆液 - 岩体的耦合作用。虽然过程中会遇到收敛难题,但通过合理的调整和优化,我们能够得到较为理想的模拟结果,为实际工程应用提供有价值的参考。希望这篇博文能给对该领域感兴趣的朋友一些启发,大家一起探索更多有趣的模拟可能!


















 744
744

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









