



 该文介绍了使用ROS(机器人操作系统)创建C++和PythonHelloWorld程序的步骤,包括创建工作空间、功能包、编写代码、修改CMakeLists.txt以及编译和运行。同时,还提到了使用terminator终端工具进行多命令管理。
该文介绍了使用ROS(机器人操作系统)创建C++和PythonHelloWorld程序的步骤,包括创建工作空间、功能包、编写代码、修改CMakeLists.txt以及编译和运行。同时,还提到了使用terminator终端工具进行多命令管理。
一、cpp
1.新建文件
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make -DPYTHON_EXECUTABLE=usr/bin/python3
2.建立功能包
cd src
catkin_create_pkg helloworld roscpp rospy std_msgs
cd helloworld/src
3.源码与编译
sudo gedit hello.cpp
写入:
#include"ros/ros.h"
int main(int argc ,char *argv[ ] )
{ ros::init(argc,argv,"haha");
ROS_INFO("hello world")
return o;
}
编译前修改:CMakelist
包的映射:用helloworld映射hello.cpp
lib映射也是一样
add_executable(helloworld src/hello.cpp)
target_link_libraries(helloworld
${catkin_LIBRARIES}
)
返回去编译:
catkin_make
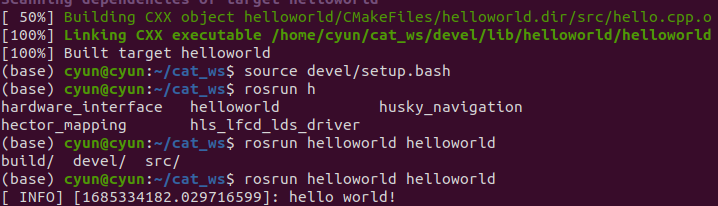
4.结果:
roscore
rosrun helloworld helloworld
二、py
py版本基本操作相差不大,只是细节部分的处理:
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make -DPYTHON_EXECUTABLE=usr/bin/python3
cd src
catkin_create_pkg helloworld roscpp rospy std_msgs
此时不再是进入,而是创建和src同级的scripts
mkdir -p helloworls/scripts
然后写hello.py:
import rospy
if __name__ == "__main__":
rospy.init_node("Hello")
rospy.loginfo("Hello World from python!")
再去修改CMakelists
c++的后面注释:
catkin_install_python(PROGRAMS
scripts/hello.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
以上的只是改了scripts/hello.py
然后正常编译执行
结果:
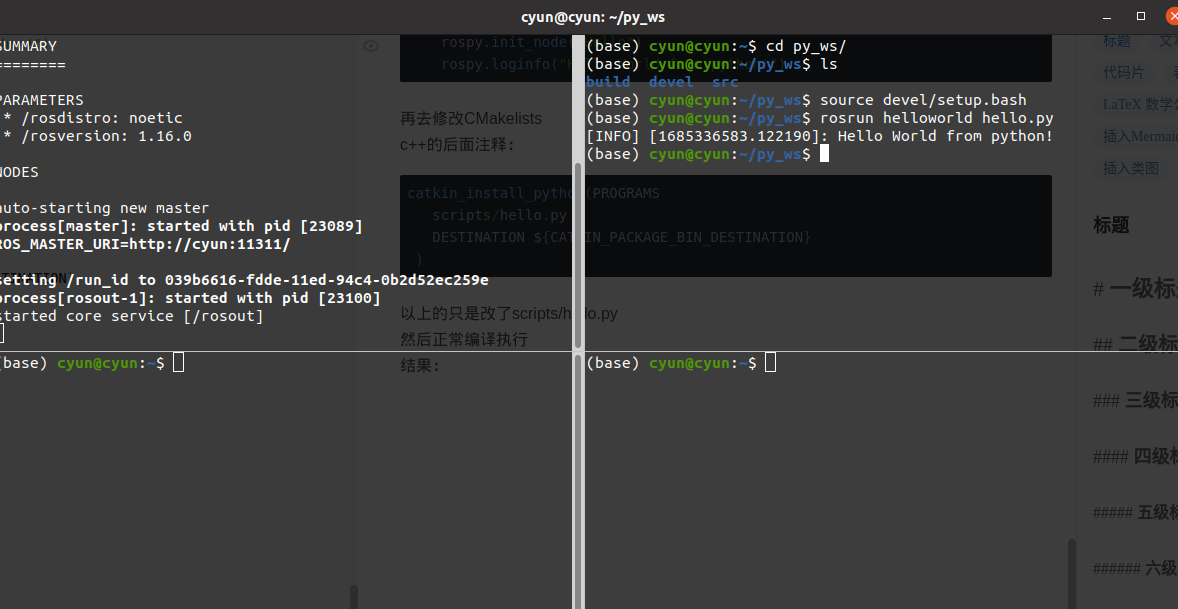
写到这里,我发现一个很不错的终端方案:
sudo apt-get install terminator
安装好后就能进行分屏了,十分适合运行多命令
再修改一下终端配置:
sudo gedit ~/.config/terminator/config
[global_config]
geometry_hinting = False
handle_size = 1
inactive_color_offset = 1.0
title_font = mry_KacstQurn Bold 11
title_hide_sizetext = True
[keybindings]
[layouts]
[[default]]
[[[child1]]]
parent = window0
profile = default
type = Terminal
[[[window0]]]
parent = ""
type = Window
[plugins]
[profiles]
[[default]]
background_darkness = 0.76
background_image = None
background_type = transparent
cursor_color = "#3036ec"
custom_command = tmux
font = Ubuntu Mono 13
foreground_color = "#ffffff"
login_shell = True
show_titlebar = False
use_system_font = False


















 9868
9868

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











