




万物始于Hello World,为了体验ROS,使用Hello World介绍ROS的简单使用。
一、Hello World工程简介
首先需要创建工程,流程为:
- 创建工作空间目录(即工程根目录,注意此时还不是ROS工作空间,只是一个目录)
- 初始化工作空间(即把当前目录初始化为一个ROS工作空间)
- 创建功能包(ROS基本单元,可以理解为一个功能模块,每个工程至少有一个功能包)
- 编辑源文件(写代码实现需求)
- 编辑编译配置文件(ROS1使用CMake编译系统,这里编辑CMakeList.txt文件)
- 编译工程(使用CMake编译ROS工程,生成可执行文件,即ros节点,下文均称作节点)
不只是Hello World,所有ROS工程都是这样的流程。
另外,目前ROS开发主要使用C++和Python语言,这里使用Python实现。
二、ROS Hello World
注:其中ros_helloworld是工作空间的自定义名称。
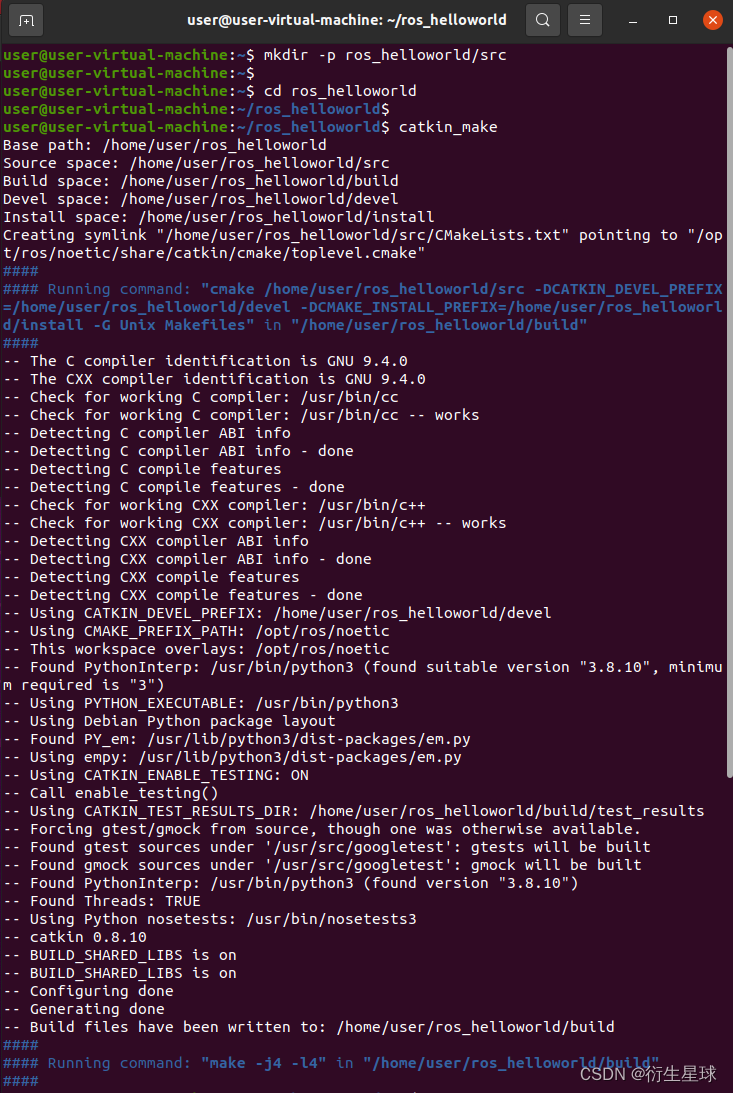
01 创建工作空间
mkdir -p ros_helloworld/src
cd ros_helloworld
catkin_make
02 创建功能包
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6771
6771

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









