



1.简单粗暴的数据录制
录制点云数据:
sudo tcpdump -i ens33 -w /home/cyun/my_lidar.pcap udp port 6699 or udp port 7788
录制can报文:
candump -l can2
canplayer -I candump-2023-xx-xx_xxxxxx.log
# 格式: canplayer -I <文件> 录制时can=现在想要的输出的can口
canplayer -I my_drive_data.log i can2=can0
2.创建虚拟can口与can消息的发布
# 1. 加载虚拟CAN模块
sudo modprobe vcan
# 2. 创建一个叫 can2 的虚拟接口 (名字必须和你 python 代码里的一致!)
sudo ip link add dev can2 type vcan
# 3. 启动接口
sudo ip link set up can2
发送测试
# -g 10: 间隔10ms发一次
# -I 32A: 指定发送 ID 为 32A (即810)
# -D r: 数据内容随机
cangen can2 -g 10 -I 32A -D r
3.通信频率与缓存空间
rslidar(以及绝大多数激光雷达)使用的是 UDP 协议 进行大量数据的传输。
这个问题一般就是ros2 topic hz 打印出来的频率是非常低的(大概是6-7hz的样子)
如果发现频率问题,那就一定是这个缓存空间不够的问题了,我们需要设置一下linux的默认缓存空间(注意:这里有个误区,千万不要去配置dds的yaml给ros2!!!)
sudo gedit /etc/sysctl.d/10-cyclone-max.conf
# ------------- 雷达 UDP 缓冲区优化 -------------
# UDP 接收缓冲区(读缓冲区,工控机收雷达数据)
net.core.rmem_default = 26214400 # 默认 25MB
net.core.rmem_max = 67108864 # 最大 64MB
# UDP 发送缓冲区(写缓冲区,DDS 发点云数据)
net.core.wmem_default = 26214400 # 默认 25MB
net.core.wmem_max = 67108864 # 最大 64MB
使设置生效:
sudo sysctl -p /etc/sysctl.d/10-cyclone-max.conf
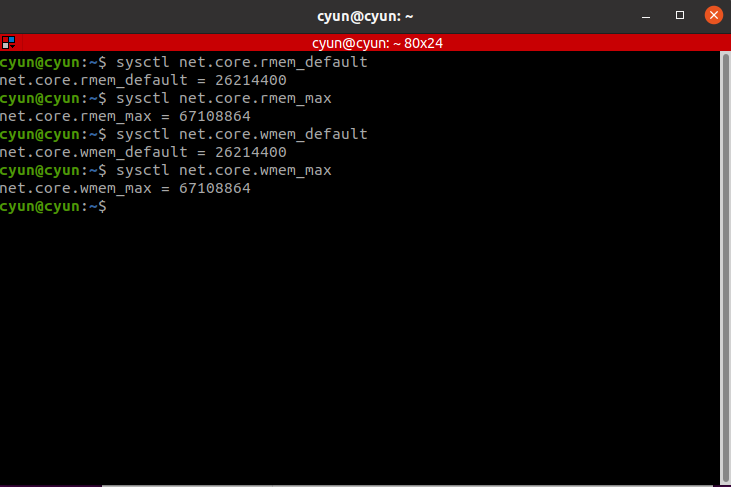
关机之后再次开机,然后查看设置是否保留了下来:
# 默认接收缓冲区大小(全局)
sysctl net.core.rmem_default
# 最大接收缓冲区大小(全局上限)
sysctl net.core.rmem_max
# 默认发送缓冲区大小(全局)
sysctl net.core.wmem_default
# 最大发送缓冲区大小(全局上限)
sysctl net.core.wmem_max
结果如下所示



















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











