




一、后端时间优化
尽管我们在路径搜索和优化中限制了 kinodynamic 的可行性,但有时我们会得到不可行的轨迹。基本原因是梯度信息往往会拉长整体轨迹,同时将其推离障碍物。因此,四旋翼飞行器必须更激进地飞行,才能在相同的时间内行驶更长的距离,如果原始运动已经接近物理极限,这不可避免地会导致过度激进的运动。
Fast Planner中是通过非均匀B样条来进行时间重分配的,与均匀 B 样条的唯一区别是它的每个结跨度 ∆tm = tm+1 − tm 都独立于其他结点区间。只改变时间分配,不改变控制点的位置,生成轨迹的几何情况是不会发生变化的。
非均匀B样条的一阶导数和二阶导数如下:

我们需要调整时间之间的间隔
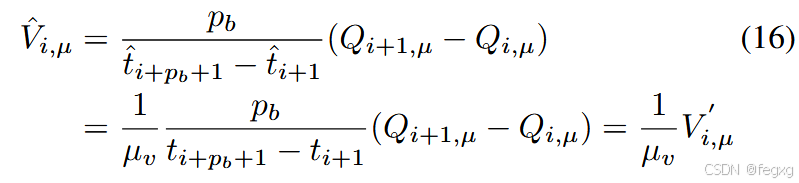
速度调整:
速度超限的控制点可以写作

其中,最大的一个超出速度限制的分量记为:,速度的最大限制为
,该速度控制点的超限主要受时间区间ti+pb+1-ti+1大小的影响,因此我们要延长该时间区间,即:
,其中,
该速度控制点变为:
对加速度控制点做同样的调整,
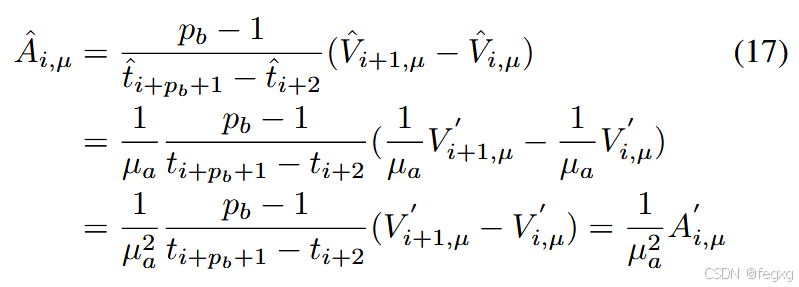
这里的
这样通过调整时间区间就使得轨迹满足动力学可行性,同时没有调整控制点的位置保证了轨迹没有发生改变。
对应的算法流程为:
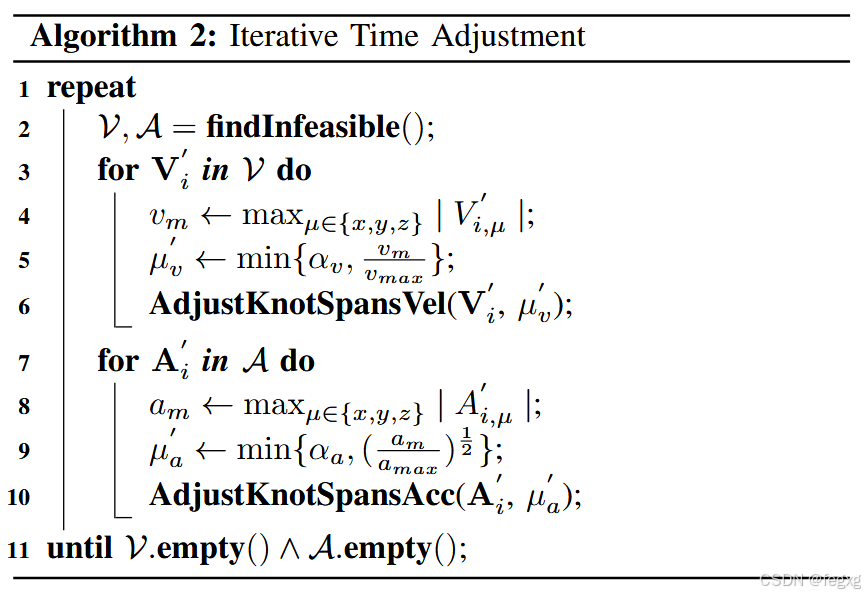
首先找出不满足动力学可行性的控制点集合V和A,分别对其做调整,这里在选择调整的参数时,有两个预设的参数αv和αa,因为结跨度 ∆tm 会影响几个控制点,反之亦然,所以用两个常数 αv 和 αa 略大于 1(第 5、9 行)来界定 μ' v 和 μ' a 可以防止任何时间跨度过度延长。
对应的实现函数为reallocateTime
bool NonUniformBspline::reallocateTime(bool show)
{
// SETY << "[Bspline]: total points size: " << control_points_.rows() << endl;
// cout << "origin knots:\n" << u_.transpose() << endl;
bool fea = true;
Eigen::MatrixXd P = control_points_;
int dimension = control_points_.cols();
double max_vel, max_acc;
/* check vel feasibility and insert points */
for (int i = 0; i < P.rows() - 1; ++i)
{
Eigen::VectorXd vel = p_ * (P.row(i + 1) - P.row(i)) / (u_(i + p_ + 1) - u_(i + 1));
if (fabs(vel(0)) > limit_vel_ + 1e-4 || fabs(vel(1)) > limit_vel_ + 1e-4 ||
fabs(vel(2)) > limit_vel_ + 1e-4)
{
fea = false;
if (show)
cout << "[Realloc]: Infeasible vel " << i << " :" << vel.transpose() << endl;
max_vel = -1.0;
for (int j = 0; j < dimension; ++j)
{
max_vel = max(max_vel, fabs(vel(j)));
}
double ratio = max_vel / limit_vel_ + 1e-4;
if (ratio > limit_ratio_)//初始设置了一个调整因子为av
ratio = limit_ratio_;
double time_ori = u_(i + p_ + 1) - u_(i + 1);//原本的时间段
double time_new = ratio * time_ori;//新的时间段变
double delta_t = time_new - time_ori;//新的时间间隔
double t_inc = delta_t / double(p_);//将时间均匀分配到p阶样条的每段时间内的增量
for (int j = i + 2; j <= i + p_ + 1; ++j)//从i+1到i+pb+1的时间段按照比例调整,在i+pb+1之后相同比例调整,调整的点为i+2到i+pb+1
{
u_(j) += double(j - i - 1) * t_inc;//这几个点每个增加j-i-1*tinc的值
if (j <= 5 && j >= 1)
{
// cout << "vel j: " << j << endl;
}
}
for (int j = i + p_ + 2; j < u_.rows(); ++j)//这之后的点增加delta_t的时间,相同的时间增加量
{
u_(j) += delta_t;
}
}
}
/* acc feasibility */
for (int i = 0; i < P.rows() - 2; ++i)
{
Eigen::VectorXd acc = p_ * (p_ - 1) *
((P.row(i + 2) - P.row(i + 1)) / (u_(i + p_ + 2) - u_(i + 2)) -
(P.row(i + 1) - P.row(i)) / (u_(i + p_ + 1) - u_(i + 1))) /
(u_(i + p_ + 1) - u_(i + 2));
if (fabs(acc(0)) > limit_acc_ + 1e-4 || fabs(acc(1)) > limit_acc_ + 1e-4 ||
fabs(acc(2)) > limit_acc_ + 1e-4)
{
fea = false;
if (show)
cout << "[Realloc]: Infeasible acc " << i << " :" << acc.transpose() << endl;
max_acc = -1.0;
for (int j = 0; j < dimension; ++j)
{
max_acc = max(max_acc, fabs(acc(j)));
}
double ratio = sqrt(max_acc / limit_acc_) + 1e-4;
if (ratio > limit_ratio_)//初始有一个调整因子为aa
ratio = limit_ratio_;
// cout << "ratio: " << ratio << endl;
double time_ori = u_(i + p_ + 1) - u_(i + 2);//原本的时间
double time_new = ratio * time_ori;//新的时间
double delta_t = time_new - time_ori;//新的时间间隔
double t_inc = delta_t / double(p_ - 1);
if (i == 1 || i == 2)
{
// cout << "acc i: " << i << endl;
for (int j = 2; j <= 5; ++j)
{
u_(j) += double(j - 1) * t_inc;
}
for (int j = 6; j < u_.rows(); ++j)
{
u_(j) += 4.0 * t_inc;
}
}
else
{
for (int j = i + 3; j <= i + p_ + 1; ++j)
{
u_(j) += double(j - i - 2) * t_inc;
if (j <= 5 && j >= 1)
{
// cout << "acc j: " << j << endl;
}
}
for (int j = i + p_ + 2; j < u_.rows(); ++j)
{
u_(j) += delta_t;
}
}
}
}
return fea;//返回是否调整成功,这里是不断循环调整,直到所有的控制点都满足动力学可行性
}首先是参数的定义
fea:标记轨迹是否满足约束,如果调整成功,最终返回 true。
P:存储当前 B-Spline 的控制点。
dimension:轨迹的维度(通常为 3D)。
max_vel & max_acc:记录轨迹的最大速度 & 加速度然后检查速度控制点,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6905
6905

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









