




本系列将更新FastPlanner论文内容对应代码的解读,其github的工程位置如下:
一、摘要
在本文中,提出了一种稳健高效的四旋翼运动规划系统,主要架构如下:
1.kinodynamic 路径搜索方法在离散控制空间中找到一个安全的、kinodynamic 可行且时间最短初始轨迹。
2.我们通过 B 样条优化来改善轨迹的平滑度和间隙,该优化结合了来自欧几里得距离场 (EDF) 的梯度信息和动态约束,有效地利用了 B 样条的凸包特性。
3.将最终轨迹表示为非均匀 B 样条,采用迭代时间调整方法来保证动态可行和非保守轨迹。
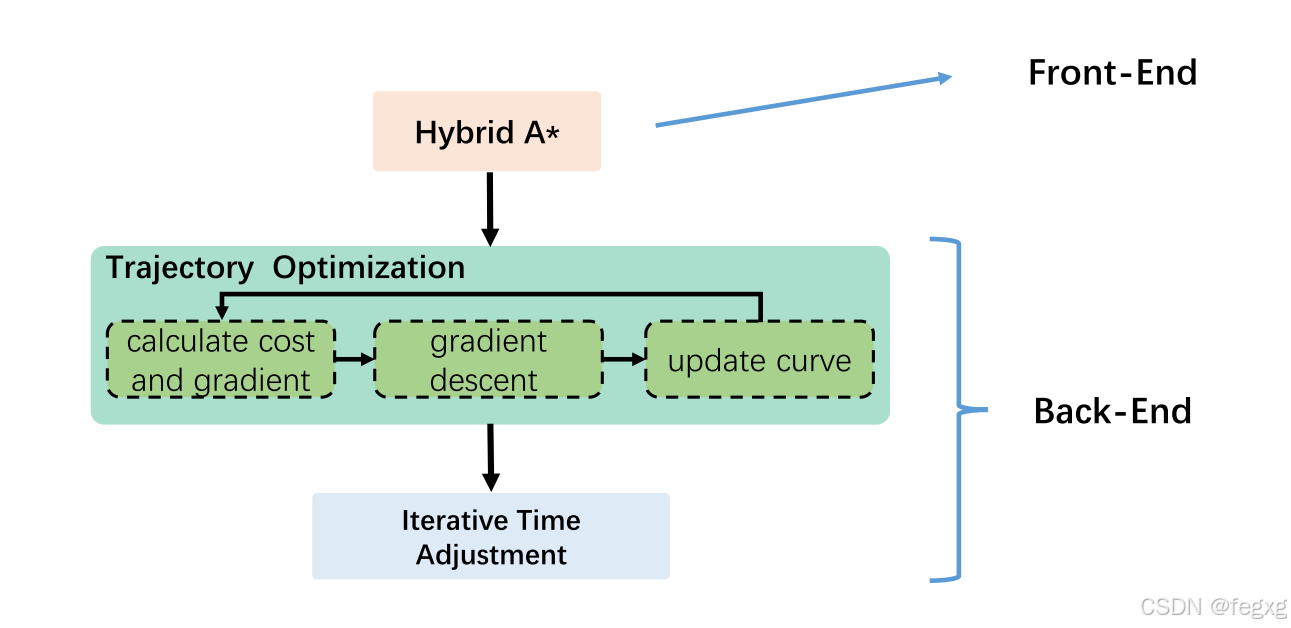
前端采用Hybrid A*算法初步搜索出一条路径,进入后端使用软约束优化得到优化好的B样条曲线,再将其表示为非均匀B样条的方式,调整控制点和时间间隔。
二、前端
1.算法架构
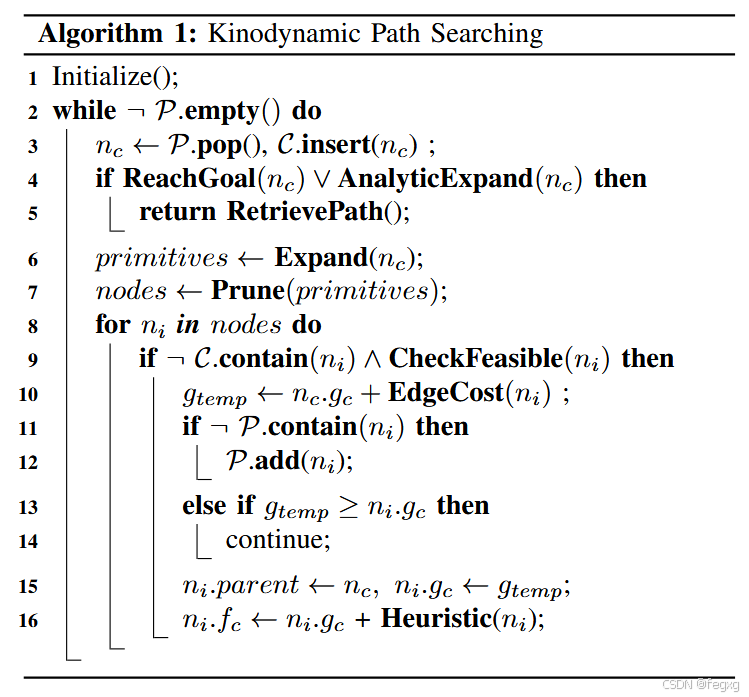
前端的kinodynamic path searching使用hybrid A*算法,在地图中搜索出一条安全的、动力学的可行轨迹,算法流程如下:
2.图搜索算法
首先我们说明图搜索算法的思路:
图搜索算法本质上是在维护一个容器,里面装着未来可能访问的节点,开始为容器里面节点数量为0,然后放入第一个节点进行循环,在循环中:
1.把容器中最符合条件的节点找到并访问弹出
2.将这个节点对周围的节点进行扩展
3.将扩展的新节点放入容器中
同时,为了防止节点被反复循环,还需要另外一个容器装载被访问的节点,后面搜索时不能再进行访问。
在这个架构下我们分析经典的基于搜索的算法:
Dijkstra算法每次弹出容器中距离源节点代价最小的节点(距离源节点的代价我们使用g来表示)。
A*算法容器的代价函数记作f,其由两个部分组成,第一个部分是g,即从源节点到当前节点累计代价,第二个部分是h,h代表启发式Heuristic代价,f=g+h。对于h的衡量有多种选择,如L2距离、曼哈顿距离等。
在原本的A*算法下,hybrid A*不同于启发式函数和动力学可行kinodynamic。在这里采用离散输入量的办法,输入量为加速度a,则位置p可以表示为:
在a的范围内进行离散采样,根据初始位置和速度可以算出该采样输入a作用下转移的新状态,由此拓展出新的节点来,并且是动力学可行的。
3.代码架构
对于这里的算法结构
首先说明其中的变量含义:
P为开集,即优先级队列,C为闭集,即已经进行扩展后的节点容器,nc为优先级队列中队首元素,nodes为拓展出的周围节点,primitives是离散输入作用的一段位移,gc为代价g,fc为总的代价f,整个流程为:
这里对应fast planner中的代码为:path_searching/src/kinodynamic_astar.cpp
int KinodynamicAstar::search(Eigen::Vector3d start_pt, Eigen::Vector3d start_v, Eigen::Vector3d start_a,
Eigen::Vector3d end_pt, Eigen::Vector3d end_v, bool init, bool dynamic, double time_start)//A*搜索
{
start_vel_ = start_v;
start_acc_ = start_a;//设置起始点的速度和加速度
PathNodePtr cur_node = path_node_pool_[0];//当前节点nc
cur_node->parent = NULL;//父节点为空
cur_node->state.head(3) = start_pt;//当前节点的位置
cur_node->state.tail(3) = start_v;//当前节点的速度
cur_node->index = posToIndex(start_pt);//将三维位置转化至栅格地图的index
cur_node->g_score = 0.0;//当前节点的gc,即从起点到当前节点的cost,这里起点为0
Eigen::VectorXd end_state(6);
Eigen::Vector3i end_index;
double time_to_goal;
end_state.head(3) = end_pt;
end_state.tail(3) = end_v;
end_index = posToIndex(end_pt);
cur_node->f_score = lambda_heu_ * estimateHeuristic(cur_node->state, end_state, time_to_goal);//计算启发式代价,初始点的fc总代价就是启发式代价,因为gc为0
cur_node->node_state = IN_OPEN_SET;//当前节点的状态,一共两种,OPEN和CLOSED,在CLOSED中的节点是已经访问过的
open_set_.push(cur_node);//OPEN加入当前节点,即优先级队列
use_node_num_ += 1;
if (dynamic)//为节点附加时间维度信息,动态搜索情况
{
time_origin_ = time_start;//记录起始时间
cur_node->time = time_start;
cur_node->time_idx = timeToIndex(time_start);//转换时间索引
expanded_nodes_.insert(cur_node->index, cur_node->time_idx, cur_node);//将 (index, time_idx) 插入到 expanded_nodes_ 中,expanded_nodes_存储已访问节点的集合
// cout << "time start: " << time_start << endl;//使用 (index, time_idx) 作为键值对,确保同一空间位置在不同时间点可以有不同的状态
}
else
expanded_nodes_.insert(cur_node->index, cur_node);//否则将用空间位置索引来记录,静态情况
PathNodePtr neighbor = NULL;
PathNodePtr terminate_node = NULL;
bool init_search = init;
const int tolerance = ceil(1 / resolution_);
while (!open_set_.empty())//主循环,优先级队列不为空
{
cur_node = open_set_.top();//弹出队首元素为当前节点nc
// Terminate?
bool reach_horizon = (cur_node->state.head(3) - start_pt).norm() >= horizon_;//接近边界
bool near_end = abs(cur_node->index(0) - end_index(0)) <= tolerance &&
abs(cur_node->index(1) - end_index(1)) <= tolerance &&
abs(cur_node->index(2) - end_index(2)) <= tolerance;//解决目标节点
if (reach_horizon || near_end)//如果某一个满足
{
terminate_node = cur_node;//当前节点为结束节点
retrievePath(terminate_node);//从结束节点开始向后倒退得到路径
if (near_end)
{
// Check whether shot traj exist
estimateHeuristic(cur_node->state, end_state, time_to_goal);//计算启发式函数,主要得到optimal_time
computeShotTraj(cur_node->state, end_state, time_to_goal);//根据这个optimal_time来计算能否直接生成一条动力学可行的路直接连接到目标点
if (init_search)//如果是初始搜索,会报错,在初始搜索阶段,如果能够直接从起点生成一条连接到目标点的轨迹(shot trajectory),通常是不合理的
ROS_ERROR("Shot in first search loop!");
}
}
if (reach_horizon)//处理各种情况
{
if (is_shot_succ_)
{
std::cout << "reach end" << std::endl;
return REACH_END;
}
else
{
std::cout << "reach horizon" << std::endl;
return REACH_HORIZON;
}
}
if (near_end)
{
if (is_shot_succ_)
{
std::cout << "reach end" << std::endl;
return REACH_END;
}
else if (cur_node->parent != NULL)
{
std::cout << "near end" << std::endl;
return NEAR_END;
}
else
{
std::cout << "no path" << std::endl;
return NO_PATH;
}
}
open_set_.pop();//弹出当前节点
cur_node->node_state = IN_CLOSE_SET;//将当前节点加入CLOSED集合,已访问过的节点集合
iter_num_ += 1;//迭代次数加1
double res = 1 / 2.0, time_res = 1 / 1.0, time_res_init = 1 / 20.0;//输入进行离散化,r取2,则对应5个离散后的输入量,
Eigen::Matrix<double, 6, 1> cur_state = cur_node->state;//当前的状态,位置和速度共6维
Eigen::Matrix<double, 6, 1> pro_state;//扩展后的节点状态
vector<PathNodePtr> tmp_expand_nodes;//临时存 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3683
3683

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









