







Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight
本文是将高飞老师等人的这篇论文翻译了一遍,顺便跟着读一下,只是记录一下自己读的论文,无其他见解,原文链接如下:
https://ieeexplore.ieee.org/document/8758904
Ⅰ介绍
无人机路径规划有两个待解决的问题,一是在给定时间和有限机载电脑资源条件下难以保证高成功率的生成安全且符合动力学可行轨迹,在未知环境中高速飞行的无人机,应该在很短的时间内不断地重新生成轨迹,以避免出现紧急威胁。二是为了确保生成运动的动态可行性,速度和加速度的约束通常保守的执行,因此需要提高生成轨迹的攻击性以满足高飞行速度的应用。
Fast采用基于启发式搜索和线性二次型最小时间控制的动态路径搜索方法。它在离散控制空间中有效地搜索一条安全、可行、时间最短的初始路径。然后,在设计的B样条优化中对初始路径进行优化,该优化利用B样条的凸包特性来结合梯度信息和动态约束。他将初始路径快速收敛为平缓,安全且动态可行的轨迹。最后,将轨迹表示为非均匀B样条,研究了导数控制点与时间分配之间的关系。基于这些关系,采用迭代时间平差方法,在避免保守约束的情况下,将不可行的速度和加速度从剖面中挤出。
Ⅱ 动力学路径搜索
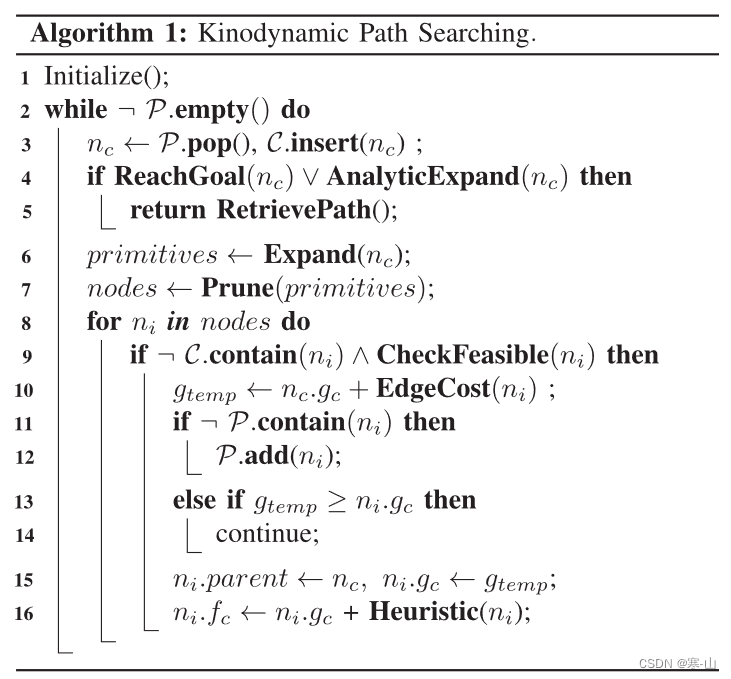
Fast的前端kinodynamic路径搜索模块源自于首先针对无人驾驶汽车提出的混合状态A *搜索,它在体素栅格地图中搜索一条关于时间长度和控制代价最小的安全和动力学可行轨迹。如Alg.1和图1所示,搜索循环类似于标准的A *算法,其中P和C分别表示开集和闭集。构成无人机动力学运动基元的是作图的边而不是直线。一个结构Node用来记录一个图元,图元结束的体素以及gc和fc的成本(B)。基元Expand()对体素栅格图进行迭代,并对除fc最小的体素外最终落在同一体素的体素进行剪枝( Prune ( ) )。然后CheckFeasible ( )检查剩余基元的安全性和动态可行性。这个过程一直持续到所有基元到达目标或者AnalyticExpand ( ) ©成功。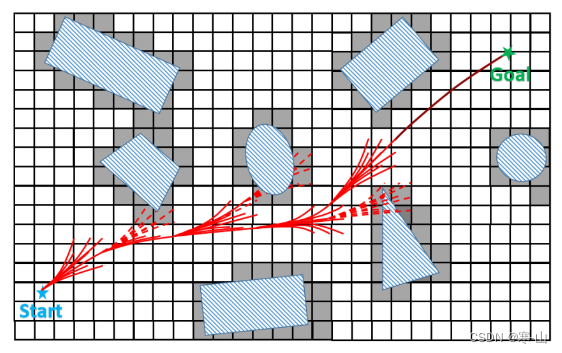
图1:对动态路径搜索的机理进行了说明。红色曲线表示生成的运动基元。紫色曲线是C中解释的解析展开式。
A.基元生成
首先讨论Expand ( )中使用的运动基元的生成。无人机的微分平坦特性使得我们可以通过三个独立的一维时间参数化多项式函数来表示轨迹:

其中μ∈{ x,y,z } ,从无人机系统的角度来看,它对应于一个线性时不变( LTI )系统。设x ( t ):= [ p ( t ) , ̇ p ( t ) , … , p ( n-1 ) ( t )]∈X⊂R3n为状态向量.令u ( t ):= p ( n ) ( t )∈U:= [ - umax , umax]3⊂R3为控制输入。状态空间模型可以定义为:

状态方程的完全解可以表示为:

其给出了初始状态为x(0)并且控制输入为u(tao)的四旋翼系统的轨迹。
在Expand()中,给定四旋翼的当前状态,在持续时间tao内应用一组离散控制输入uD⊂u。在实践中,我们选择n=2,这对应于双积分器。每个轴[−u_max,u_max]统一离散为{−u_max、−(r−1/r) u_max、…、(r−1/r)u
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1456
1456

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









