



目标:学习使用 ParameterEventHandler 类来监控和响应参数变化。
教程级别:中级
时间:20 分钟
目录
背景
先决条件
任务
1. 创建一个包
2. 编写 Python 节点
3. 建立并运行
摘要
相关内容
背景
经常有节点需要响应其自身参数或其他节点参数的变化。ParameterEventHandler 类使得监听参数变化变得简单,以便您的代码可以对它们做出响应。本教程将向您展示如何使用 ParameterEventHandler 类的 Python 版本来监控节点自身参数的变化以及其他节点参数的变化。
先决条件
在开始本教程之前,您应该先完成以下教程:
理解参数 https://docs.ros.org/en/jazzy/Tutorials/Beginner-CLI-Tools/Understanding-ROS2-Parameters/Understanding-ROS2-Parameters.html
在类中使用参数(Python) https://docs.ros.org/en/jazzy/Tutorials/Beginner-Client-Libraries/Using-Parameters-In-A-Class-Python.html
任务
在本教程中,您将创建一个新的包来包含一些示例代码,编写一些 Python 代码来使用 ParameterEventHandler 类,并测试结果代码。
1. 创建一个包
首先,打开一个新的终端并且配置你的 ROS 2 安装,以便 ros2 命令能够工作。
按照这些指示创建一个名为 ros2_ws 的新工作区。
请记住,包应该在 src 目录中创建,而不是在工作区的根目录中。因此,请导航到 ros2_ws/src ,然后在那里创建一个新包:
ros2 pkg create --build-type ament_python --license Apache-2.0 python_parameter_event_handler --dependencies rclpy您的终端将返回一条消息,确认您的包 python_parameter_event_handler 及其所有必要的文件和文件夹已创建。
` --dependencies `参数将自动向` package.xml `和` CMakeLists.txt `添加必要的依赖行。
cxy@ubuntu2404-cxy:~/ros2_ws/src$ ros2 pkg create --build-type ament_python --license Apache-2.0 python_parameter_event_handler --dependencies rclpy
going to create a new package
package name: python_parameter_event_handler
destination directory: /home/cxy/ros2_ws/src
package format: 3
version: 0.0.0
description: TODO: Package description
maintainer: ['cxy <cxy@todo.todo>']
licenses: ['Apache-2.0']
build type: ament_python
dependencies: ['rclpy']
creating folder ./python_parameter_event_handler
creating ./python_parameter_event_handler/package.xml
creating source folder
creating folder ./python_parameter_event_handler/python_parameter_event_handler
creating ./python_parameter_event_handler/setup.py
creating ./python_parameter_event_handler/setup.cfg
creating folder ./python_parameter_event_handler/resource
creating ./python_parameter_event_handler/resource/python_parameter_event_handler
creating ./python_parameter_event_handler/python_parameter_event_handler/__init__.py
creating folder ./python_parameter_event_handler/test
creating ./python_parameter_event_handler/test/test_copyright.py
creating ./python_parameter_event_handler/test/test_flake8.py
creating ./python_parameter_event_handler/test/test_pep257.py 1.1 更新 package.xml
因为您在创建包时使用了 --dependencies 选项,您无需手动将依赖项添加到 package.xml 中。但是,一如既往,请确保将描述、维护者电子邮件和姓名以及许可信息添加到 package.xml 中。
<description>Python parameter events client tutorial</description>
<maintainer email="you@email.com">Your Name</maintainer>
<license>Apache-2.0</license>2. 编写 Python 节点
在 ros2_ws/src/python_parameter_event_handler/python_parameter_event_handler 目录中,创建一个名为 parameter_event_handler.py 的新文件,并将以下代码粘贴其中:
cxy@ubuntu2404-cxy:~/ros2_ws/src/python_parameter_event_handler/python_parameter_event_handler$ gedit parameter_event_handler.py
import rclpy # 导入rclpy模块,ROS2的Python库
import rclpy.node # 导入rclpy.node模块,用于创建ROS2节点
import rclpy.parameter # 导入rclpy.parameter模块,用于处理ROS2参数
from rclpy.parameter_event_handler import ParameterEventHandler # 从rclpy.parameter_event_handler模块导入ParameterEventHandler类,用于处理参数事件
class SampleNodeWithParameters(rclpy.node.Node): # 定义一个名为SampleNodeWithParameters的类,继承自rclpy.node.Node
def __init__(self): # 类的初始化函数
super().__init__('node_with_parameters') # 调用父类的初始化函数,创建一个名为'node_with_parameters'的节点
self.declare_parameter('an_int_param', 0) # 声明一个名为'an_int_param'的参数,初始值为0
self.handler = ParameterEventHandler(self) # 创建一个ParameterEventHandler对象,用于处理参数事件
self.callback_handle = self.handler.add_parameter_callback( # 添加一个参数回调函数
parameter_name="an_int_param", # 参数名为'an_int_param'
node_name="node_with_parameters", # 节点名为'node_with_parameters'
callback=self.callback, # 回调函数为self.callback
)
def callback(self, p: rclpy.parameter.Parameter) -> None: # 定义回调函数
self.get_logger().info(f"Received an update to parameter: {p.name}: {rclpy.parameter.parameter_value_to_python(p.value)}") # 在日志中记录参数更新的信息
def main(): # 定义主函数
rclpy.init() # 初始化ROS2
node = SampleNodeWithParameters() # 创建SampleNodeWithParameters对象
rclpy.spin(node) # 使节点保持活动状态,直到被中断或关闭
rclpy.shutdown() # 关闭ROS22.1 检查代码
顶部的 import 语句用于导入包依赖项。
import rclpy
import rclpy.node
import rclpy.parameter
from rclpy.parameter_event_handler import ParameterEventHandler下一段代码创建了类 SampleNodeWithParameters 和构造函数。该类的构造函数声明了一个整数参数 an_int_param ,默认值为 0。接下来,代码创建了一个 ParameterEventHandler ,用于监控参数的变化。
class SampleNodeWithParameters(rclpy.node.Node):
def __init__(self):
super().__init__('node_with_parameters')
self.declare_parameter('an_int_param', 0)
self.handler = ParameterEventHandler(self)最后,我们添加参数回调并获取新回调的回调处理程序。
便条
保存由 add_parameter_callback 返回的句柄非常重要;否则,回调将无法正确注册。
self.callback_handle = self.handler.add_parameter_callback(
parameter_name="an_int_param",
node_name="node_with_parameters",
callback=self.callback,
)对于回调函数,我们使用 SampleNodeWithParameters 类的 callback 方法。
def callback(self, p: rclpy.parameter.Parameter) -> None:
self.get_logger().info(f"Received an update to parameter: {p.name}: {rclpy.parameter.parameter_value_to_python(p.value)}")跟随 SampleNodeWithParameters 是一个典型的 main 函数,它初始化 ROS,旋转样本节点以便它可以发送和接收消息,然后在用户在控制台输入^C 之后关闭。
def main():
rclpy.init()
node = SampleNodeWithParameters()
rclpy.spin(node)
rclpy.shutdown()2.2 添加一个入口点
打开 setup.py 文件。再次,将 maintainer 、 maintainer_email 、 description 和 license 字段与您的 package.xml 匹配:
maintainer='YourName',
maintainer_email='you@email.com',
description='Python parameter tutorial',
license='Apache-2.0',在 entry_points 字段的 console_scripts 括号内添加以下行:
entry_points={
'console_scripts': [
'node_with_parameters = python_parameter_event_handler.parameter_event_handler:main',
],
},
3. 构建并运行
在工作区的根目录运行 rosdep ( ros2_ws )以检查构建前缺失的依赖项是一个好习惯:
rosdep install -i --from-path src --rosdistro $ROS_DISTRO -y返回到您的工作区根目录, ros2_ws ,然后构建您的新包:
cxy@ubuntu2404-cxy:~/ros2_ws$ colcon build --packages-select python_parameter_event_handler
Starting >>> python_parameter_event_handler
Finished <<< python_parameter_event_handler [6.80s]
Summary: 1 package finished [7.58s]打开一个新的终端,导航到 ros2_ws ,并且导入设置文件:
. install/setup.bash现在运行节点:
ros2 run python_parameter_event_handler node_with_parameters节点现在已激活,具有单一参数,并将在此参数更新时打印消息。为了测试这一点,请打开另一个终端,像以前一样加载 ROS 设置文件,然后执行以下命令:
ros2 param set node_with_parameters an_int_param 43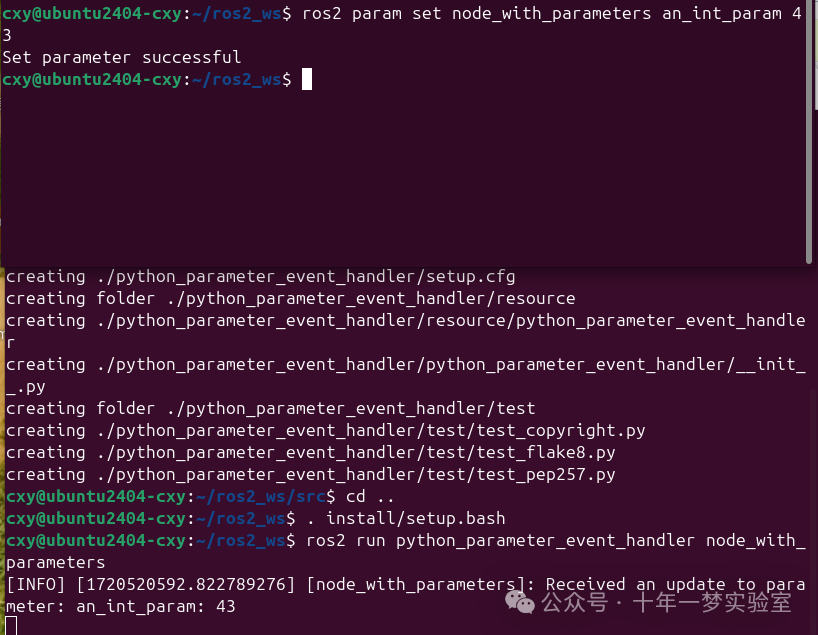
运行节点的终端将显示类似于以下的消息:
[INFO] [1698483083.315084660] [node_with_parameters]: Received an update to parameter: an_int_param: 43我们之前在节点中设置的回调函数已被调用,并显示了新的更新值。您现在可以使用终端中的 ^C 终止正在运行的 parameter_event_handler 示例。
3.1 监视另一节点参数的变化
您也可以使用 ParameterEventHandler 来监控对另一个节点参数的更改。让我们更新 SampleNodeWithParameters 类,以监控另一个节点中参数的变化。我们将使用 parameter_blackboard 演示应用程序来托管一个双参数,我们将监控其更新。
首先更新构造函数,将以下代码添加到现有代码之后:
def __init__(...):
...
self.callback_handle = self.handler.add_parameter_callback(
parameter_name="a_double_param",
node_name="parameter_blackboard",
callback=self.callback,
)在终端中,导航回到您的工作区根目录, ros2_ws ,然后像以前一样构建您的更新包:
colcon build --packages-select python_parameter_event_handler
cxy@ubuntu2404-cxy:~/ros2_ws$ colcon build --packages-select python_parameter_event_handler
Starting >>> python_parameter_event_handler
Finished <<< python_parameter_event_handler [2.45s]
Summary: 1 package finished [2.69s]然后获取设置文件:
. install/setup.bash现在,为了测试远程参数的监控,请首先运行新构建的 parameter_event_handler 代码:
ros2 run python_parameter_event_handler node_with_parameters接下来,在另一个已初始化 ROS 的终端中,运行 parameter_blackboard 演示应用程序,如下:
ros2 run demo_nodes_cpp parameter_blackboard最后,在第三个终端(已初始化 ROS),让我们在 parameter_blackboard 节点上设置一个参数:
ros2 param set parameter_blackboard a_double_param 3.45执行此命令后,您应该会在 parameter_event_handler 窗口中看到输出,表明在参数更新时调用了回调函数:
[INFO] [1699821958.757770223] [node_with_parameters]: Received an update to parameter: a_double_param: 3.45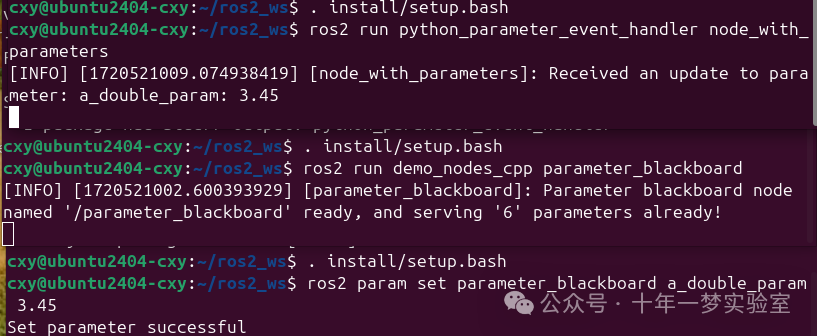
摘要
您创建了一个带有参数的节点,并使用 ParameterEventHandler 类设置了一个回调来监视该参数的变化。您还使用同一个类来监视远程节点的变化。ParameterEventHandler 是一种监控参数变化的便捷方式,以便您可以对更新后的值做出响应。
相关内容
要了解如何将 ROS 1 参数文件适配到 ROS 2,请参阅从 ROS 1 到 ROS 2 迁移 YAML 参数文件的教程。https://docs.ros.org/en/jazzy/How-To-Guides/Migrating-from-ROS1/Migrating-Parameters.html

















 1372
1372

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









