



目标:在 ROS 2 包中定义一个动作。
教程级别:中级
时间:5 分钟
目录
背景
先决条件
任务
1. 创建一个接口包
2. 定义一个动作
3. 构建动作
摘要
下一步
相关内容
背景
您之前已经在了解动作教程中学习了有关动作的内容。就像其他通信类型及其各自的接口(主题/msg 和服务/srv)一样,您也可以在您的包中自定义动作。本教程将向您展示如何定义和构建一个动作,您可以在下一个教程中编写的动作服务器和动作客户端中使用它。
先决条件
您应该安装 ROS 2 和 colcon。
您应该知道如何设置工作区并创建包。
记得首先配置你的 ROS 2 安装环境。
任务
1. 创建一个接口包
mkdir -p ~/ros2_ws/src # you can reuse an existing workspace with this naming convention
cxy@ubuntu2404-cxy:~$ cd ~/ros2_ws/src
cxy@ubuntu2404-cxy:~/ros2_ws/src$ ros2 pkg create --license Apache-2.0 custom_action_interfaces
going to create a new package
package name: custom_action_interfaces
destination directory: /home/cxy/ros2_ws/src
package format: 3
version: 0.0.0
description: TODO: Package description
maintainer: ['cxy <cxy@todo.todo>']
licenses: ['Apache-2.0']
build type: ament_cmake
dependencies: []
creating folder ./custom_action_interfaces
creating ./custom_action_interfaces/package.xml
creating source and include folder
creating folder ./custom_action_interfaces/src
creating folder ./custom_action_interfaces/include/custom_action_interfaces
creating ./custom_action_interfaces/CMakeLists.txt2.定义一个动作
行动定义在 .action 形式的文件中:
# Request
---
# Result
---
# Feedback一个动作定义由三个消息定义组成,它们之间用 --- 分隔。
请求消息从动作客户端发送到动作服务器,以启动一个新目标。
当目标完成时,操作服务器会向操作客户端发送一个结果消息。
反馈消息会定期从动作服务器发送到动作客户端,以更新关于目标的信息。
一个动作的实例通常被称为一个目标。
假设我们要定义一个新的动作“Fibonacci”,用于计算斐波那契序列。
在我们的 ROS 2 包 custom_action_interfaces 中创建一个 action 目录:
cd custom_action_interfaces
mkdir action
cxy@ubuntu2404-cxy:~/ros2_ws/src/custom_action_interfaces$ cd action
cxy@ubuntu2404-cxy:~/ros2_ws/src/custom_action_interfaces/action$ gedit Fibonacci.action在 action 目录中,创建一个名为 Fibonacci.action 的文件,内容如下:
int32 order
---
int32[] sequence
---
int32[] partial_sequence目标请求是我们想要计算的斐波那契序列的 order ,结果是最终的 sequence ,反馈是到目前为止计算的 partial_sequence 。
3. 构建动作
在我们的代码中使用新的斐波那契操作类型之前,我们必须将定义传递给 rosidl 代码生成管道。
这是通过在 ament_package() 行之前,向我们的 CMakeLists.txt 中添加以下几行来实现的:
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"action/Fibonacci.action"
)// 定义CMake的最低版本要求为3.8
cmake_minimum_required(VERSION 3.8)
// 定义项目名称为custom_action_interfaces
project(custom_action_interfaces)
// 如果编译器是GNU或Clang,添加编译选项
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
// 查找依赖项
find_package(ament_cmake REQUIRED)
// 如果需要手动填写其他依赖项,取消以下部分的注释
// find_package(<dependency> REQUIRED)
// 查找rosidl_default_generators包
find_package(rosidl_default_generators REQUIRED)
// 生成接口
rosidl_generate_interfaces(${PROJECT_NAME}
"action/Fibonacci.action"
)
// 如果构建测试
if(BUILD_TESTING)
// 查找ament_lint_auto包
find_package(ament_lint_auto REQUIRED)
// 下一行跳过检查版权的linter
// 当所有源文件都添加了版权和许可时,注释掉这行
set(ament_cmake_copyright_FOUND TRUE)
// 下一行跳过cpplint(只在git仓库中工作)
// 当这个包在git仓库中,并且所有源文件都添加了版权和许可时,注释掉这行
set(ament_cmake_cpplint_FOUND TRUE)
// 查找测试依赖项
ament_lint_auto_find_test_dependencies()
endif()
// 打包
ament_package()我们还应该将所需的依赖项添加到我们的 package.xml 中:
<buildtool_depend>rosidl_default_generators</buildtool_depend>
<member_of_group>rosidl_interface_packages</member_of_group><!-- 定义XML版本为1.0 -->
<?xml version="1.0"?>
<!-- 定义XML模型的链接和模式类型 -->
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<!-- 定义包的格式为3 -->
<package format="3">
<!-- 定义包的名称为custom_action_interfaces -->
<name>custom_action_interfaces</name>
<!-- 定义包的版本为0.0.0 -->
<version>0.0.0</version>
<!-- 定义包的描述,这里需要填写具体的描述 -->
<description> Creating an action</description>
<!-- 定义包的维护者和联系方式 -->
<maintainer email="cxy@126.com">cxy</maintainer>
<!-- 定义包的许可证为Apache-2.0 -->
<license>Apache-2.0</license>
<!-- 定义构建工具的依赖为ament_cmake -->
<buildtool_depend>ament_cmake</buildtool_depend>
<!-- 定义构建工具的依赖为rosidl_default_generators -->
<buildtool_depend>rosidl_default_generators</buildtool_depend>
<!-- 定义包为rosidl_interface_packages组的成员 -->
<member_of_group>rosidl_interface_packages</member_of_group>
<!-- 定义测试依赖为ament_lint_auto -->
<test_depend>ament_lint_auto</test_depend>
<!-- 定义测试依赖为ament_lint_common -->
<test_depend>ament_lint_common</test_depend>
<!-- 导出构建类型为ament_cmake -->
<export>
<build_type>ament_cmake</build_type>
</export>
<!-- 结束包的定义 -->
</package>我们现在应该能够构建包含 Fibonacci 操作定义的包:
# Change to the root of the workspace
cd ~/ros2_ws
# Build
cxy@ubuntu2404-cxy:~/ros2_ws$ colcon build --packages-select custom_action_interfaces
Starting >>> custom_action_interfaces
Finished <<< custom_action_interfaces [24.5s]
Summary: 1 package finished [34.3s]我们完成了!
按照惯例,动作类型将以其包名称和单词 action 为前缀。因此,当我们要引用我们的新动作时,它将具有完整名称 custom_action_interfaces/action/Fibonacci 。
我们可以使用命令行工具检查我们的操作是否成功构建。首先导入我们的工作空间:
source install/local_setup.bash现在检查我们的操作定义是否存在:
cxy@ubuntu2404-cxy:~/ros2_ws$ source install/local_setup.bash
cxy@ubuntu2404-cxy:~/ros2_ws$ ros2 interface show custom_action_interfaces/action/Fibonacci
int32 order
---
int32[] sequence
---
int32[] partial_sequence您应该看到屏幕上打印的斐波那契操作定义。
摘要
在本教程中,您学习了动作定义的结构。您还学习了如何使用 CMakeLists.txt 和 package.xml 正确构建新的动作接口,以及如何验证构建成功。
下一步
接下来,让我们通过创建一个动作服务和客户端(在 Python https://docs.ros.org/en/jazzy/Tutorials/Intermediate/Writing-an-Action-Server-Client/Py.html 或 C++ https://docs.ros.org/en/jazzy/Tutorials/Intermediate/Writing-an-Action-Server-Client/Cpp.html 中)来利用您新定义的动作接口。
相关内容
有关 ROS 操作的更详细信息,请参阅设计文章https://design.ros2.org/articles/actions.html 。
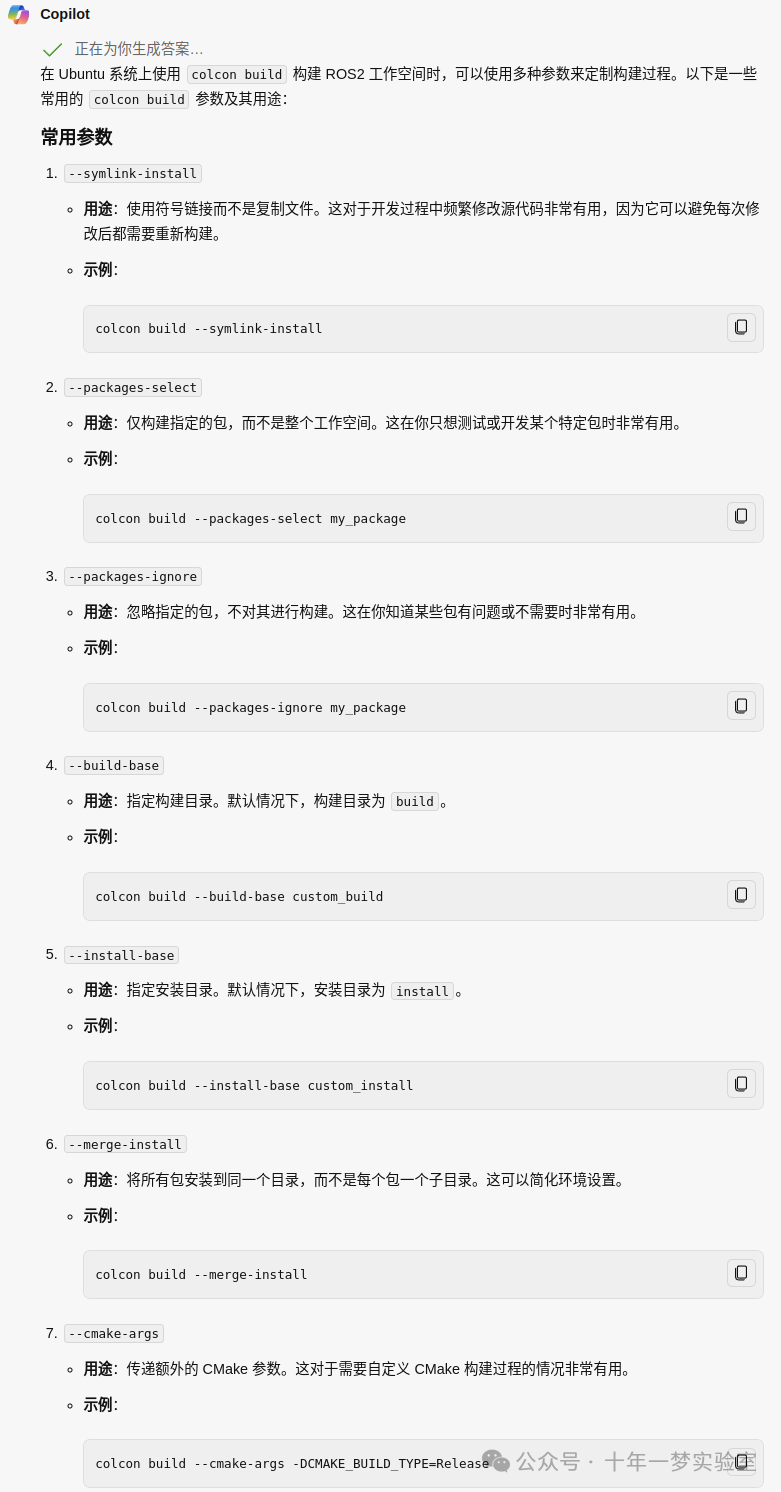
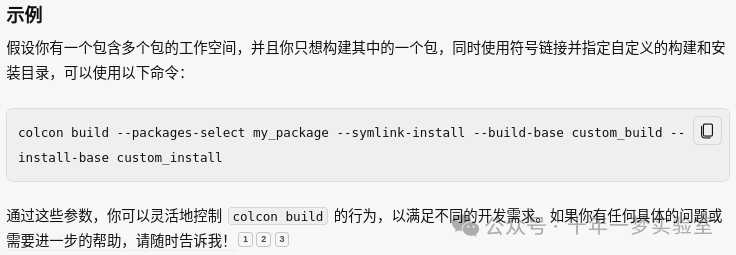
详细介绍ubuntu 系统 ROS2 colcon build 参数
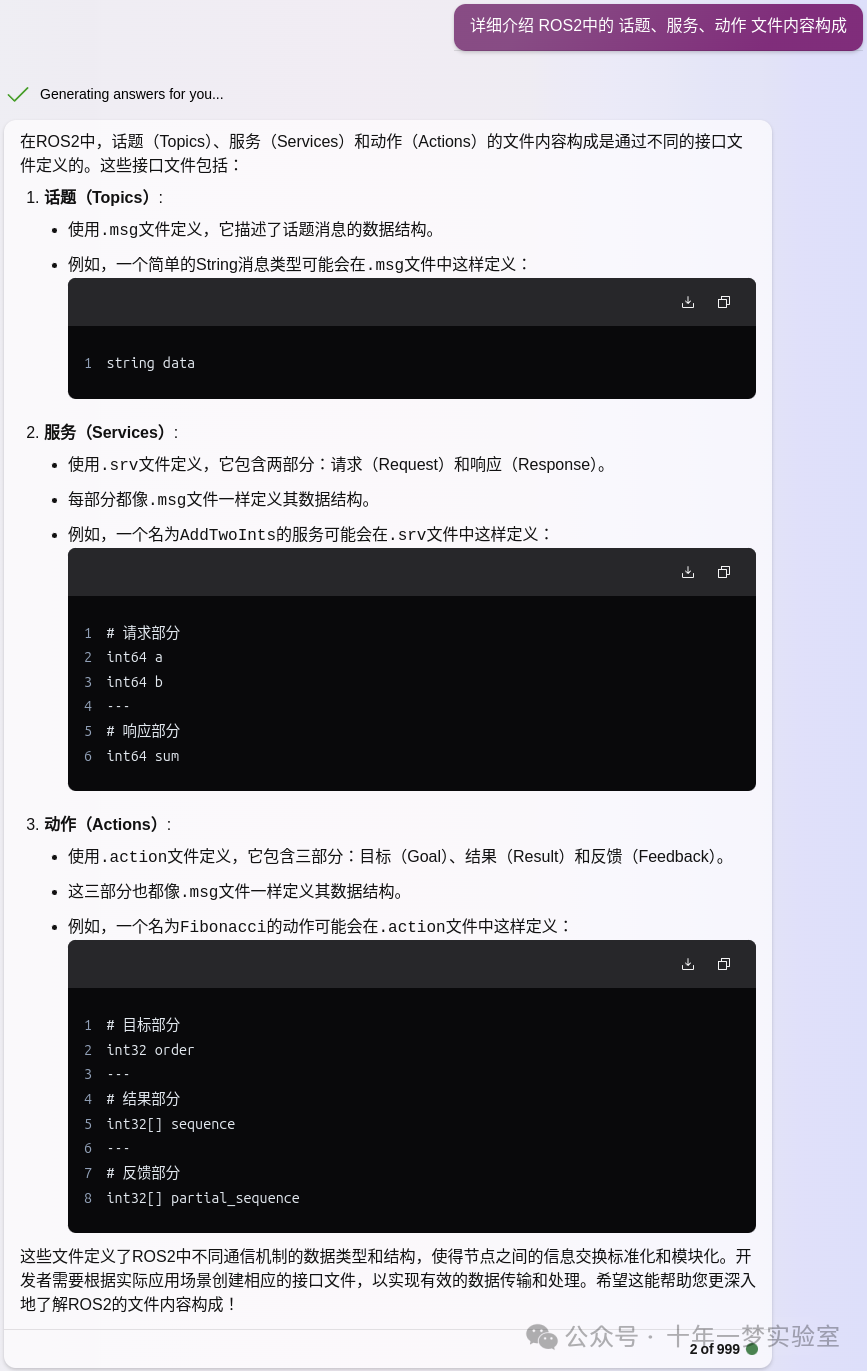
详细介绍 ROS2中的 话题、服务、动作 文件内容构成

















 453
453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









