



目标:使用 C++创建并运行一个发布者和订阅者节点。
教程级别:初学者
时间:20 分钟
目录
背景
先决条件
任务
1. 创建一个包
2. 编写发布者节点
3. 编写订阅者节点
4. 构建并运行
摘要
下一步
相关内容
背景
节点是在 ROS 图上进行通信的可执行过程。在本教程中,节点将通过主题相互传递字符串消息形式的信息。这里使用的例子是一个简单的“说话者”和“监听者”系统;一个节点发布数据,另一个节点订阅主题以接收该数据。
这些示例中使用的代码可以在这里找到。
先决条件
在之前的教程中,您学习了如何创建工作区和创建包。
任务
1. 创建一个包
打开一个新的终端并且初始化您的 ROS 2 安装,这样 ros2 命令就会生效。
导航到在之前教程中创建的 ros2_ws 目录。
请记住,包应该在 src 目录中创建,而不是在工作区的根目录中。因此,请导航到 ros2_ws/src ,然后运行包创建命令:
ros2 pkg create --build-type ament_cmake --license Apache-2.0 cpp_pubsubcxy@ubuntu2404-cxy:~/ros2_ws/src$ ros2 pkg create --build-type ament_cmake --license Apache-2.0 cpp_pubsub
going to create a new package
package name: cpp_pubsub
destination directory: /home/cxy/ros2_ws/src
package format: 3
version: 0.0.0
description: TODO: Package description
maintainer: ['cxy <cxy@todo.todo>']
licenses: ['Apache-2.0']
build type: ament_cmake
dependencies: []
creating folder ./cpp_pubsub
creating ./cpp_pubsub/package.xml
creating source and include folder
creating folder ./cpp_pubsub/src
creating folder ./cpp_pubsub/include/cpp_pubsub
creating ./cpp_pubsub/CMakeLists.txt您的终端将返回一条消息,确认您的包 cpp_pubsub 及其所有必要的文件和文件夹已创建。
导航到 ros2_ws/src/cpp_pubsub/src 。请记住,这是任何 CMake 包中包含可执行文件的源文件所在的目录。
2. 编写发布者节点
下载示例发布者代码,请输入以下命令:
cxy@ubuntu2404-cxy:~/ros2_ws/src$ cd cpp_pubsub/src
cxy@ubuntu2404-cxy:~/ros2_ws/src/cpp_pubsub/src$ wget -O publisher_lambda_function.cpp https://raw.githubusercontent.com/ros2/examples/jazzy/rclcpp/topics/minimal_publisher/lambda.cpp
--2024-07-05 21:02:40-- https://raw.githubusercontent.com/ros2/examples/jazzy/rclcpp/topics/minimal_publisher/lambda.cpp
正在连接 127.0.0.1:2334... 已连接。
已发出 Proxy 请求,正在等待回应... 200 OK
长度:1849 (1.8K) [text/plain]
正在保存至: ‘publisher_lambda_function.cpp’
publisher_lambda_fu 100%[===================>] 1.81K --.-KB/s 用时 0s
2024-07-05 21:02:42 (6.81 MB/s) - 已保存 ‘publisher_lambda_function.cpp’ [1849/1849])现在将有一个名为 publisher_lambda_function.cpp 的新文件。使用您喜欢的文本编辑器打开该文件。
// 版权 2016 开源机器人基金会,公司。
//
// 根据 Apache 许可证,版本 2.0(“许可证”)许可;
// 除非符合许可证,否则不得使用此文件。
// 您可以在以下位置获取许可证副本:
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// 除非适用法律要求或书面同意,否则在许可证下分发的软件
// 将按“原样”基础分发,无任何形式的明示或暗示保证或条件。
// 有关在许可证下管理权限和限制的特定语言,请参阅许可证。
#include <chrono> // 包含 C++ 标准库中的时间函数
#include <memory> // 包含 C++ 标准库中的内存管理函数
#include <string> // 包含 C++ 标准库中的字符串函数
#include "rclcpp/rclcpp.hpp" // 包含 ROS 2 的 rclcpp 库
#include "std_msgs/msg/string.hpp" // 包含 ROS 2 的标准消息类型
using namespace std::chrono_literals; // 使用 C++ 标准库中的时间字面量
/* 这个例子创建了一个 Node 的子类,并使用了一个精巧的 C++11 lambda
* 函数来简化回调语法,但这使得代码在初次查看时更难理解。*/
class MinimalPublisher : public rclcpp::Node // 定义一个 MinimalPublisher 类,它是 rclcpp::Node 的子类
{
public:
MinimalPublisher() // MinimalPublisher 类的构造函数
: Node("minimal_publisher"), count_(0) // 初始化节点名为 "minimal_publisher",计数器 count_ 为 0
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10); // 创建一个发布者,发布到 "topic" 主题,队列大小为 10
auto timer_callback = // 定义一个定时器回调函数
[this]() -> void { // 这是一个 lambda 函数,捕获 this 指针
auto message = std_msgs::msg::String(); // 创建一个 std_msgs::msg::String 类型的消息
message.data = "Hello, world! " + std::to_string(this->count_++); // 设置消息的内容,包括一个字符串和计数器的值
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str()); // 在控制台上打印一条信息,显示正在发布的消息
this->publisher_->publish(message); // 发布消息
};
timer_ = this->create_wall_timer(500ms, timer_callback); // 创建一个定时器,每 500 毫秒调用一次定时器回调函数
}
private:
rclcpp::TimerBase::SharedPtr timer_; // 定义一个定时器
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_; // 定义一个发布者
size_t count_; // 定义一个计数器
};
int main(int argc, char * argv[]) // 主函数
{
rclcpp::init(argc, argv); // 初始化 ROS 2
rclcpp::spin(std::make_shared<MinimalPublisher>()); // 创建一个 MinimalPublisher 类的实例,并让它保持运行
rclcpp::shutdown(); // 关闭 ROS 2
return 0; // 返回 0,表示程序正常结束
}检查代码 2.1
代码的顶部包括您将使用的标准 C++头文件。在标准 C++头文件之后是 rclcpp/rclcpp.hpp 包含,它允许您使用 ROS 2 系统中最常见的部分。最后是 std_msgs/msg/string.hpp ,它包括了您将用来发布数据的内置消息类型。
#include <chrono>
#include <memory>
#include <string>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;这些行代表节点的依赖项。请记住,依赖项必须添加到 package.xml 和 CMakeLists.txt 中,您将在下一部分中执行此操作。
下一行通过继承 rclcpp::Node 来创建节点类 MinimalPublisher 。代码中的每个 this 都是指节点。
class MinimalPublisher : public rclcpp::Node公共构造函数将节点命名为 minimal_publisher 并将 count_ 初始化为 0。在构造函数内部,发布者使用 String 消息类型、主题名称 topic 以及所需的队列大小来初始化,以限制备份事件中的消息。接下来,声明了一个名为 timer_callback 的 lambda 函数。它通过引用捕获当前对象 this ,不接受输入参数并返回 void。 timer_callback 函数创建一个类型为 String 的新消息,设置其数据为所需的字符串并发布它。 RCLCPP_INFO 宏确保每个发布的消息都打印到控制台。最后,初始化 timer_ ,这导致 timer_callback 函数每秒执行两次。
public:
MinimalPublisher()
: Node("minimal_publisher"), count_(0)
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
auto timer_callback =
[this]() -> void {
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(this->count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
this->publisher_->publish(message);
};
timer_ = this->create_wall_timer(500ms, timer_callback);
}在类的底部是计时器、发布者和计数器字段的声明。
private:
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;继 MinimalPublisher 类之后是 main ,节点在此实际执行。 rclcpp::init 初始化 ROS 2, rclcpp::spin 开始处理来自节点的数据,包括来自计时器的回调。
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalPublisher>());
rclcpp::shutdown();
return 0;
}2.2 添加依赖项
返回到 ros2_ws/src/cpp_pubsub 目录, CMakeLists.txt 和 package.xml 文件已为您创建。
使用您的文本编辑器打开 package.xml 。
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>cpp_pubsub</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="cxy@todo.todo">cxy</maintainer>
<license>Apache-2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>如前所述教程中提到的,确保填写 <description> 、 <maintainer> 和 <license> 标签:
<description>Examples of minimal publisher/subscriber using rclcpp</description>
<maintainer email="you@email.com">Your Name</maintainer>
<license>Apache-2.0</license>在 ament_cmake 构建工具依赖项之后添加新行,并粘贴以下与您节点的 include 语句相对应的依赖项:
<depend>rclcpp</depend>
<depend>std_msgs</depend>这声明了当代码构建和执行时,包需要 rclcpp 和 std_msgs 。
确保保存文件。
2.3 CMakeLists.txt
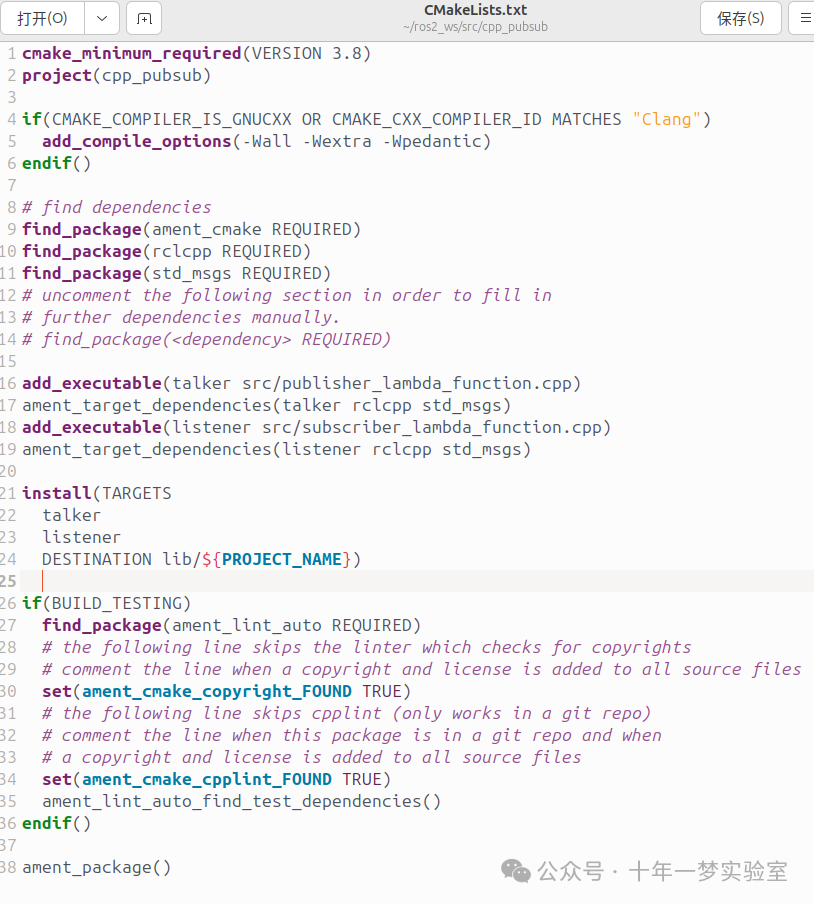
现在打开 CMakeLists.txt 文件。
cmake_minimum_required(VERSION 3.8) // 设置 CMake 的最低版本要求为 3.8
project(cpp_pubsub) // 定义一个名为 cpp_pubsub 的项目
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang") // 如果编译器是 GNU C++ 或 Clang
add_compile_options(-Wall -Wextra -Wpedantic) // 添加编译选项,开启所有警告、额外警告和严格模式
endif()
// 寻找依赖项
find_package(ament_cmake REQUIRED) // 寻找 ament_cmake 包,这是必需的
// 取消下面的注释以手动填写更多的依赖项
// find_package(<dependency> REQUIRED)
if(BUILD_TESTING) // 如果开启了测试
find_package(ament_lint_auto REQUIRED) // 寻找 ament_lint_auto 包,这是必需的
// 下面这行跳过了检查版权的 linter
// 当所有源文件都添加了版权和许可证时,注释掉这行
set(ament_cmake_copyright_FOUND TRUE)
// 下面这行跳过了 cpplint(只在 git 仓库中有效)
// 当这个包在一个 git 仓库中,并且所有源文件都添加了版权和许可证时,注释掉这行
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies() // 自动寻找测试依赖项
endif()
ament_package() // 创建 ament 包在现有的依赖项 find_package(ament_cmake REQUIRED) 下面,添加以下几行:
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)之后,添加可执行文件并将其命名为 talker ,这样您就可以使用 ros2 run 运行您的节点:
add_executable(talker src/publisher_lambda_function.cpp)
ament_target_dependencies(talker rclcpp std_msgs)最后,添加 install(TARGETS...) 部分,以便 ros2 run 可以找到你的可执行文件:
install(TARGETS
talker
DESTINATION lib/${PROJECT_NAME})您可以通过删除一些不必要的部分和评论来清理您的 CMakeLists.txt ,使其看起来像这样:
cmake_minimum_required(VERSION 3.5) // 设置 CMake 的最低版本要求为 3.5
project(cpp_pubsub) // 定义一个名为 cpp_pubsub 的项目
// 默认使用 C++14
if(NOT CMAKE_CXX_STANDARD) // 如果没有指定 C++ 标准
set(CMAKE_CXX_STANDARD 14) // 则设置 C++ 标准为 14
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang") // 如果编译器是 GNU C++ 或 Clang
add_compile_options(-Wall -Wextra -Wpedantic) // 添加编译选项,开启所有警告、额外警告和严格模式
endif()
find_package(ament_cmake REQUIRED) // 寻找 ament_cmake 包,这是必需的
find_package(rclcpp REQUIRED) // 寻找 rclcpp 包,这是必需的
find_package(std_msgs REQUIRED) // 寻找 std_msgs 包,这是必需的
add_executable(talker src/publisher_lambda_function.cpp) // 添加一个名为 talker 的可执行文件,源文件为 src/publisher_lambda_function.cpp
ament_target_dependencies(talker rclcpp std_msgs) // 设置 talker 的依赖项为 rclcpp 和 std_msgs
install(TARGETS // 安装目标
talker // 安装 talker
DESTINATION lib/${PROJECT_NAME}) // 安装位置为 lib/${PROJECT_NAME}
ament_package() // 创建 ament 包您现在可以构建您的包,源本地设置文件,并运行它,但让我们先创建订阅者节点,这样您就可以看到完整系统的运作。
3. 编写订阅者节点
返回 ros2_ws/src/cpp_pubsub/src 以创建下一个节点。在您的终端输入以下代码:
cxy@ubuntu2404-cxy:~/ros2_ws/src/cpp_pubsub/src$ wget -O subscriber_lambda_function.cpp https://raw.githubusercontent.com/ros2/examples/jazzy/rclcpp/topics/minimal_subscriber/lambda.cpp
--2024-07-05 21:35:49-- https://raw.githubusercontent.com/ros2/examples/jazzy/rclcpp/topics/minimal_subscriber/lambda.cpp
正在连接 127.0.0.1:2334... 已连接。
已发出 Proxy 请求,正在等待回应... 200 OK
长度: 1335 (1.3K) [text/plain]
正在保存至: ‘subscriber_lambda_function.cpp’
subscriber_lambda_f 100%[===================>] 1.30K --.-KB/s 用时 0s
2024-07-05 21:35:50 (26.2 MB/s) - 已保存 ‘subscriber_lambda_function.cpp’ [1335/1335])检查以确保这些文件存在:
publisher_lambda_function.cpp subscriber_lambda_function.cpp打开 subscriber_lambda_function.cpp 使用你的文本编辑器。
// 版权 2016 Open Source Robotics Foundation, Inc.
//
// 根据 Apache 许可证版本 2.0(“许可证”)许可;
// 除非符合许可证,否则不得使用此文件。
// 您可以在以下位置获取许可证副本:
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// 除非适用法律要求或书面同意,否则在许可证下分发的软件
// 将按“原样”基础分发,
// 无任何明示或暗示的保证或条件。
// 有关在许可证下的权限和
// 限制的特定语言,请参阅许可证。
#include <memory> // 包含内存库
#include "rclcpp/rclcpp.hpp" // 包含 ROS 的 rclcpp 库
#include "std_msgs/msg/string.hpp" // 包含 std_msgs 的 string 消息类型
class MinimalSubscriber : public rclcpp::Node // 定义一个名为 MinimalSubscriber 的类,它继承自 rclcpp::Node
{
public:
MinimalSubscriber() // MinimalSubscriber 类的构造函数
: Node("minimal_subscriber") // 初始化 Node,节点名为 "minimal_subscriber"
{
auto topic_callback = // 定义一个回调函数
this -> void { // 当收到消息时,执行此函数
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str()); // 在控制台打印收到的消息
};
subscription_ = // 创建一个订阅者
this->create_subscription<std_msgs::msg::String>("topic", 10, topic_callback); // 订阅名为 "topic" 的主题,队列大小为 10,回调函数为 topic_callback
}
private:
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_; // 定义一个订阅者的共享指针
};
int main(int argc, char * argv[]) // 主函数
{
rclcpp::init(argc, argv); // 初始化 ROS
rclcpp::spin(std::make_shared<MinimalSubscriber>()); // 创建 MinimalSubscriber 的实例并开始循环
rclcpp::shutdown(); // 关闭 ROS
return 0; // 返回 0,表示程序正常结束
}3.1 检查代码
订阅者节点的代码与发布者的几乎相同。现在节点被命名为 minimal_subscriber ,构造函数使用节点的 create_subscription 函数来执行回调。
没有计时器,因为订阅者只是在数据发布到 topic 主题时才做出响应。
该 topic_callback 函数接收在主题上发布的字符串消息数据,并使用 RCLCPP_INFO 宏简单地将其写入控制台。
回想一下主题教程中的内容,发布者和订阅者使用的主题名称和消息类型必须匹配,以便它们能够通信。
public:
MinimalSubscriber()
: Node("minimal_subscriber")
{
auto topic_callback =
[this](std_msgs::msg::String::UniquePtr msg) -> void {
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
};
subscription_ =
this->create_subscription<std_msgs::msg::String>("topic", 10, topic_callback);
}本类中唯一的字段声明是订阅。
private:
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;main 函数的作用完全相同,只是现在它会旋转 MinimalSubscriber 节点。对于发布者节点,旋转意味着启动计时器,但对于订阅者来说,它仅仅意味着准备好随时接收消息。
由于此节点与发布者节点具有相同的依赖关系,因此没有新内容需要添加到 package.xml 。
3.2 CMakeLists.txt
重新打开 CMakeLists.txt ,并在发布者条目下添加订阅者节点的可执行文件和目标。
add_executable(listener src/subscriber_lambda_function.cpp)
ament_target_dependencies(listener rclcpp std_msgs)
install(TARGETS
talker
listener
DESTINATION lib/${PROJECT_NAME})请确保保存文件,然后您的发布/订阅系统应该就绪。
4. 构建并运行
您可能已经在 ROS 2 系统中安装了 rclcpp 和 std_msgs 包。在构建之前,在工作空间的根目录( ros2_ws )运行 rosdep 以检查缺失的依赖项是一个好习惯:
rosdep install -i --from-path src --rosdistro jazzy -y仍在您的工作区的根目录中, ros2_ws ,构建您的新包:
cxy@ubuntu2404-cxy:~/ros2_ws$ colcon build --packages-select cpp_pubsub
Starting >>> cpp_pubsub
Finished <<< cpp_pubsub [21.1s]
Summary: 1 package finished [21.6s]打开一个新的终端,导航到 ros2_ws ,并且导入设置文件:
. install/setup.bash现在运行 talker 节点:
ros2 run cpp_pubsub talker终端应该每 0.5 秒发布一次信息消息,如下:
cxy@ubuntu2404-cxy:~/ros2_ws$ . install/setup.bash
cxy@ubuntu2404-cxy:~/ros2_ws$ ros2 run cpp_pubsub talker
[INFO] [1720187087.525329991] [minimal_publisher]: Publishing: 'Hello, world! 0'
[INFO] [1720187088.025417781] [minimal_publisher]: Publishing: 'Hello, world! 1'
[INFO] [1720187088.525298470] [minimal_publisher]: Publishing: 'Hello, world! 2'
[INFO] [1720187089.025531468] [minimal_publisher]: Publishing: 'Hello, world! 3'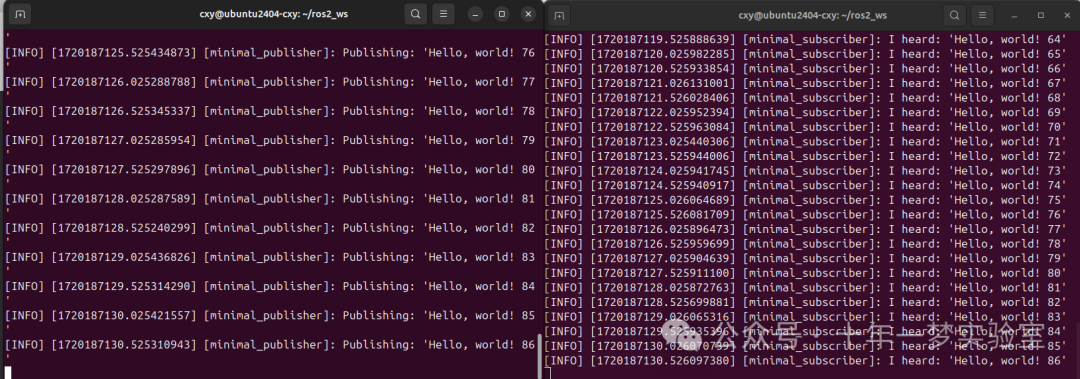
打开另一个终端,再次从 ros2_ws 内部加载设置文件,然后启动监听节点:
cxy@ubuntu2404-cxy:~/ros2_ws$ ros2 run cpp_pubsub listener
Package 'cpp_pubsub' not found
cxy@ubuntu2404-cxy:~/ros2_ws$ . install/setup.bash
cxy@ubuntu2404-cxy:~/ros2_ws$ ros2 run cpp_pubsub listener
[INFO] [1720187115.025931086] [minimal_subscriber]: I heard: 'Hello, world! 55'
[INFO] [1720187115.525992227] [minimal_subscriber]: I heard: 'Hello, world! 56'
[INFO] [1720187116.025935417] [minimal_subscriber]: I heard: 'Hello, world! 57'
[INFO] [1720187116.525967640] [minimal_subscriber]: I heard: 'Hello, world! 58'
[INFO] [1720187117.025949535] [minimal_subscriber]: I heard: 'Hello, world! 59'
[INFO] [1720187117.526001204] [minimal_subscriber]: I heard: 'Hello, world! 60'在每个终端输入 Ctrl+C 以停止节点旋转。
摘要
您创建了两个节点,用于通过主题发布和订阅数据。在编译和运行它们之前,您将它们的依赖项和可执行文件添加到包配置文件中。
下一步
接下来,您将使用服务/客户端 service/client 模型创建另一个简单的 ROS 2 包。同样,您可以选择用 C++ https://docs.ros.org/en/jazzy/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Cpp-Service-And-Client.html 或 Python https://docs.ros.org/en/jazzy/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Py-Service-And-Client.html 编写。
相关内容
有几种方法可以用 C++编写发布者和订阅者;请查看 ros2/examples 仓库中的 minimal_publisher 和 minimal_subscriber 包。https://github.com/ros2/examples/tree/jazzy/rclcpp/topics

















 1695
1695

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









