






 本文对比了MoveIt与RobotStudio的功能与应用,MoveIt专长于运动规划,而RobotStudio则侧重于路径仿真实验。文章还介绍了MoveIt中的五种运动规划器及其参数配置的重要性,并提及了noether刀具路径规划包在工业过程中的应用,以及ROS与ABB机器人控制器接口的相关细节。
本文对比了MoveIt与RobotStudio的功能与应用,MoveIt专长于运动规划,而RobotStudio则侧重于路径仿真实验。文章还介绍了MoveIt中的五种运动规划器及其参数配置的重要性,并提及了noether刀具路径规划包在工业过程中的应用,以及ROS与ABB机器人控制器接口的相关细节。
一、MoveIt与RobotStudio
MoveIt主要用于运动规划,RobotStudio主要用于对规划后的路径进行仿真。两者用途不同,不具有相互替代性。 使用MoveIt可以规划出避免碰撞的笛卡尔路径,但是对于某一个路径点,MoveIt选择的轴配置与RobotStudio选择的轴配置可能会不一样(不清楚有没有办法可以避免),这样就可能存在MoveIt避障规划的路径,在RobotStudio下仿真时出现机械臂连杆与周围环境(比如筛盘,高的零件)碰撞的问题。
MoveIt进行运动规划可以认为是事前避免(碰撞、不可达、奇异点等)
RobotStudio仿真后矫正,可以认为是事后修改(碰撞,不可达,奇异点等)。
MoveIt进行运动规划有很大可能是可以用的(需要ABB机器人控制器关闭轴配置功能)。MoveIt整合了最新的研究成果,世界各地名校的科研人员和各地工程师一起来迭代这款软件,做工程还是应该尽可能选这类软件。
二、MoveIt 圆弧设置接口
MoveIt中目前包含了5中运动规划器或者优化器。
- Open Motion Planning Library (OMPL)
- Pilz Industrial Motion Planner
- Stochastic Trajectory Optimization for Motion Planning (STOMP)
- Search-Based Planning Library (SBPL)
- Covariant Hamiltonian Optimization for Motion Planning (CHOMP)
- 除了pilz运动规划器没有明确的包含参数的构造函数之外,其他四种规划器(下图仅以CHOMP源码为例)在初始化时都需要输入规划或者优化参数。我不确定这些参数能否满足我们的圆弧调整需要。 对于这类规划算法的参数,调参是一项很重要的工作。调参也就是怎么配置参数能够满足我们的工程需要。 Pilz虽然没有参数设置,但是可以看到它的源码目录下包含轨迹生成圆弧,轨迹生产直线的类。具体怎么使用,能达到什么效果需要我们实践才能知道。
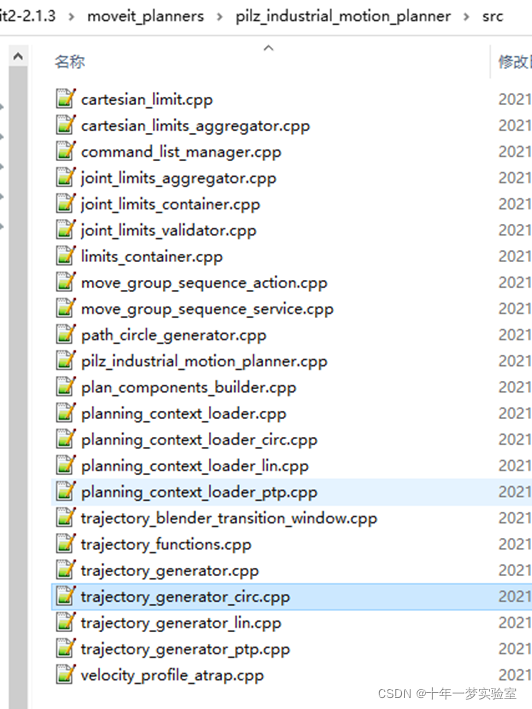
Pilz Industrial Motion Planner
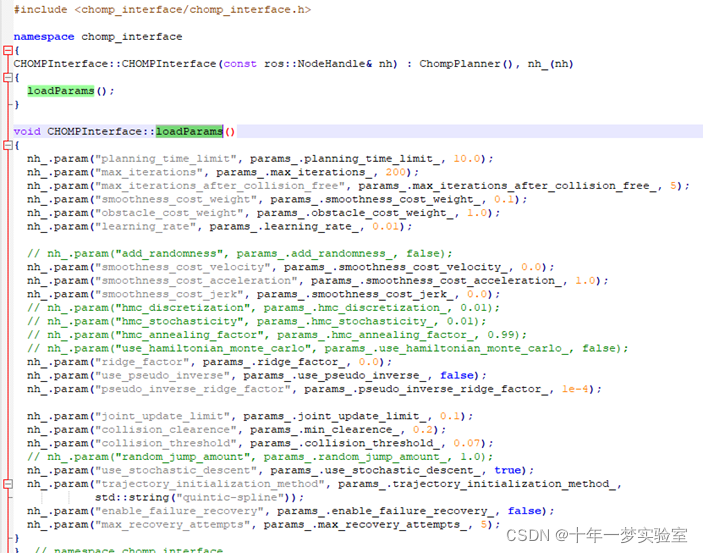
CHOMP 运动规划器 具有参数设置接口
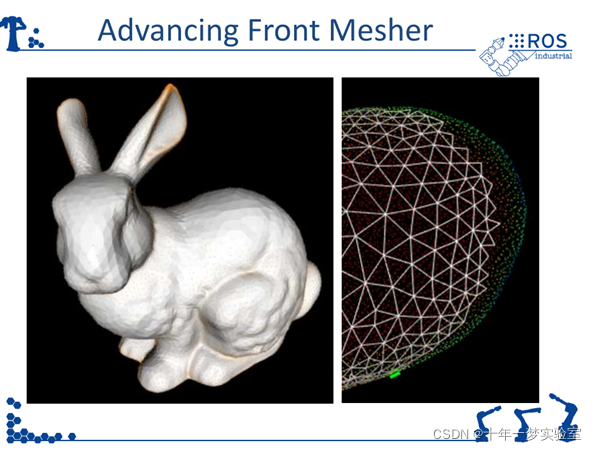
三、noether刀具路径规划(ROS-Industrial)
这个ROS-I包中包含了Advancing Front Meshing Algorithm,可以用于网格表面等值线生成。Add Advancing Front Meshing Algorithm to PCL · Issue #1946 · PointCloudLibrary/pcl (github.com)
该软件包依赖于 PCL 1.9.1+ 和 VTK 7.1+。 如果您使用的是 Ubuntu 系统版本 20.04+ (ROS Noetic/Foxy),您应该已经拥有这些并且可以跳到构建说明。 否则继续安装自定义 PCL 和 VTK 版本。
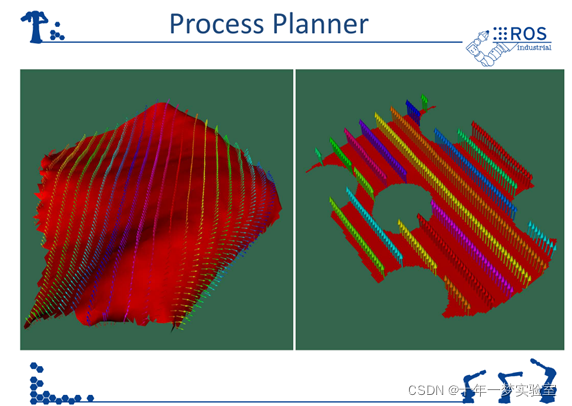
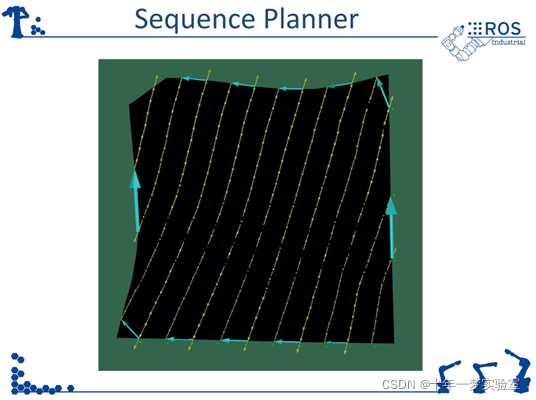
noether涵盖了一个框架的开发,用于从 3D 几何形状自动生成用于工业过程(例如喷漆或打磨)的高效刀具路径规划。 这项工作被组织成三个主要的软件模块。 第一个模块分析 3D 数据以提取对所需过程而言显着的特征。 第二个模块处理这些特征以生成刀具路径,以最佳地对各个特征执行过程。 最后一个模块,序列规划,确定处理整个零件的最佳顺序。
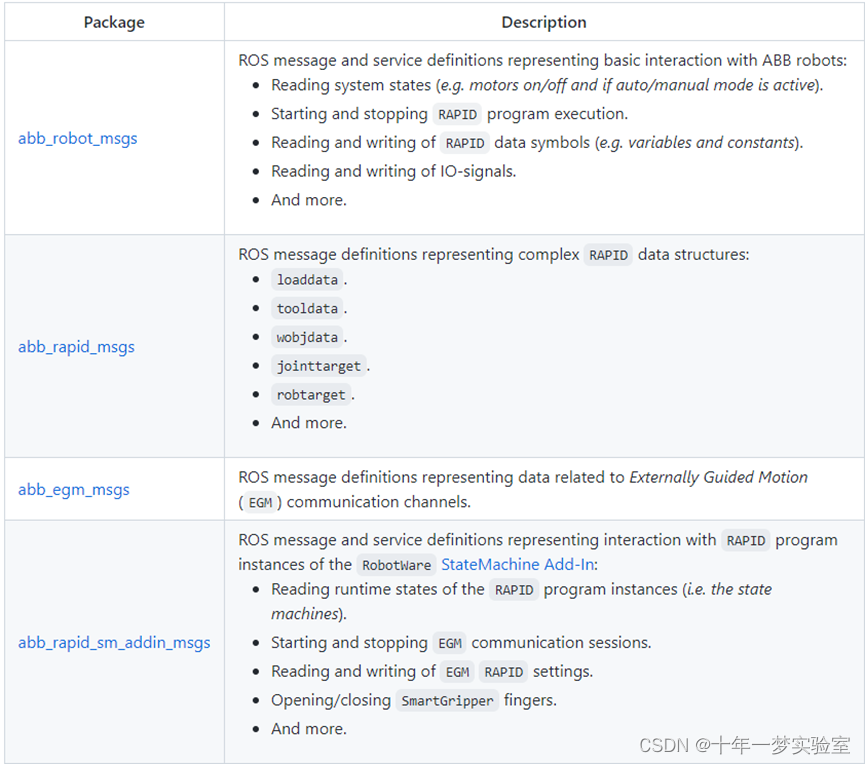
四、ROS与ABB机器人控制器接口
可以通过下面的接口实现与控制器的数据交互。
ABB机器人驱动接口:
请注意,所包含的软件包尚未产品化,学术界是目标受众。
软件包按“原样”提供,因此只能获得有限的支持。

















 1272
1272

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









