




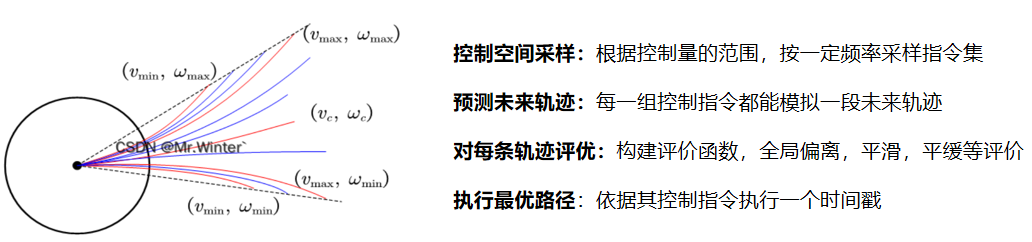
DWA动态窗口法
优点:考虑动力学运动学约束,速度够快,依赖评价函数
缺点:容易陷入U型陷阱出不来,视野比较短
APF人工势场法
优点:速度极快,
缺点:目标不可达,局部极小值,不符合运动学约束,容易振荡,依赖全局路径提供阶段目标点
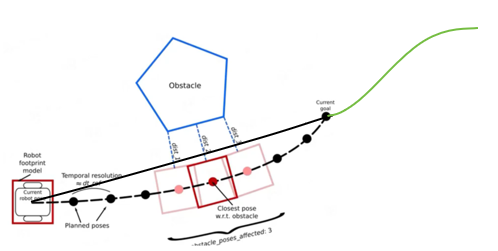
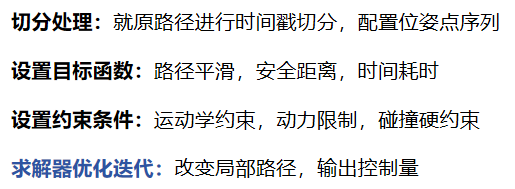
TEB时间弹力带
优点:轨迹质量高,约束处理强
缺点:计算复杂度比较高
推荐观看Mr.Winter哥的原创文章,本文二创梳理总结
优点:考虑动力学运动学约束,速度够快,依赖评价函数
缺点:容易陷入U型陷阱出不来,视野比较短
优点:速度极快,
缺点:目标不可达,局部极小值,不符合运动学约束,容易振荡,依赖全局路径提供阶段目标点
优点:轨迹质量高,约束处理强
缺点:计算复杂度比较高
推荐观看Mr.Winter哥的原创文章,本文二创梳理总结
 2892
1万+
5957
3620
4477
2892
1万+
5957
3620
4477

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























