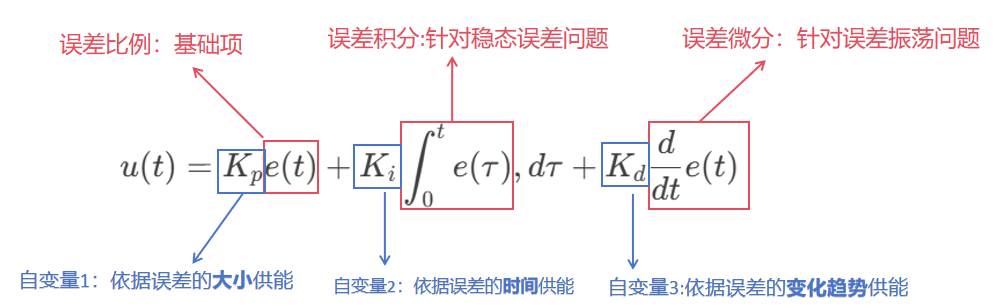
PID-广泛适用,通杀技能
MPC-约束模型,精准控制
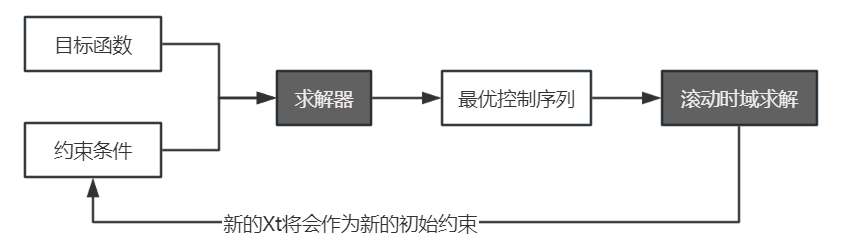
一.设定约束和目标函数
目标函数的作用是在多约束条件下,能够最小化误差并平缓控制量的变化
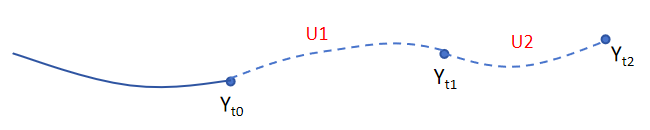
二.求解U并向前滚动
整个流程是不断的求解最优控制量,然后不断执行,不断求解
一.设定约束和目标函数
目标函数的作用是在多约束条件下,能够最小化误差并平缓控制量的变化
二.求解U并向前滚动
整个流程是不断的求解最优控制量,然后不断执行,不断求解
 2907
1590
2907
1590

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言