




传感器数据
1.传感器的数据(Imu,摄像头,雷达)数据均可以在ros2的rviz中订阅话题然后显示
IMU-惯性测量单元:加速度计+陀螺仪+磁力计
#include <filter.hpp> // 专用滤波库
2.滤波算法包括
平均滤波 低通滤波 中值滤波 卡尔曼滤波 互补滤波
SLAM算法
今天我们来谈一谈,为什么我们需要AMCL算法,它有何精妙之处?
1.AMCL定位算法是如何应运而生的?
局部路径规划 算法的一个输入就是start当前位置,所以必须不断的执行 “定位任务”
而传统的负责定位的 “里程计测距模块”本身不够健壮因为打滑/滑移导致估计位置和真实位置错位
所以必须需要某种算法利用雷达或者摄像头的扫描数据来计算校准start的位置
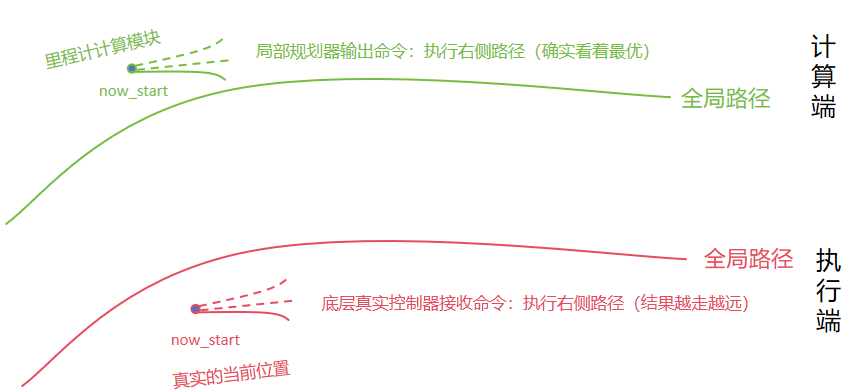
总结:局部规划需要start,而仅仅基于里程计的定位有漂移,导致局部器指令的“理论与现实”脱轨
2.AMCL算法是如何承担这个定位校准的任务的?
首先是随机撒点,给出周围各种(x,y,θ)的样本
计算出每个样本位置理论的扫描数据M1,M2,M3.....
接收下位机当前位置扫描的真实数据M'
比对谁的数据最接近M',谁就是真实的定位
为什么只帮里程计校准不负责,因为计算量注定无法高频校准

















 17万+
17万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









