




具备自适应能力的互补滤波算法,通过实时评估传感器噪声水平,动态调整陀螺仪与加速度计之间的融合比例,在外部扰动或噪声变化的环境下保持稳定的姿态估计精度。
相比传统的固定参数互补滤波方法,无需人工调参,能够根据数据特性自动优化滤波权重,从而显著提升姿态估计的鲁棒性、精度与适应性。
订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果
运行结果
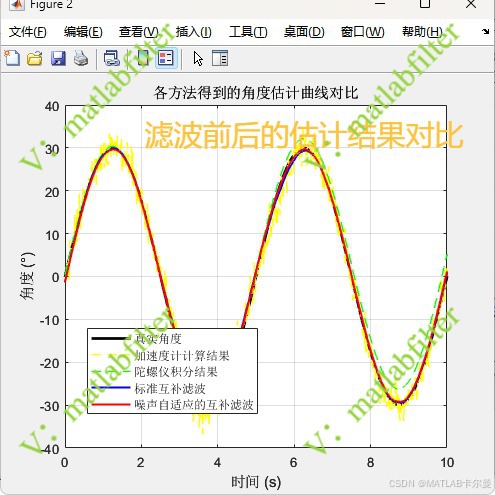
滤波前后的角度估计曲线对比:
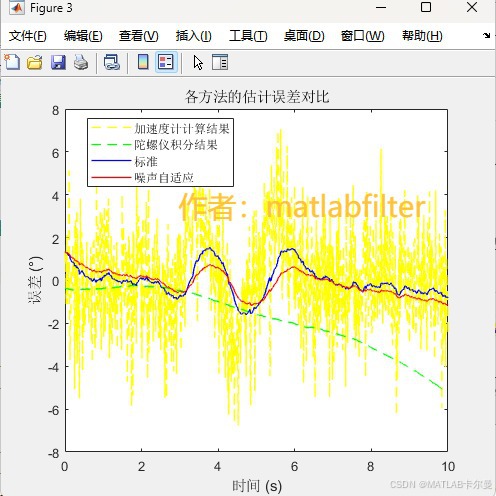
误差对比曲线:
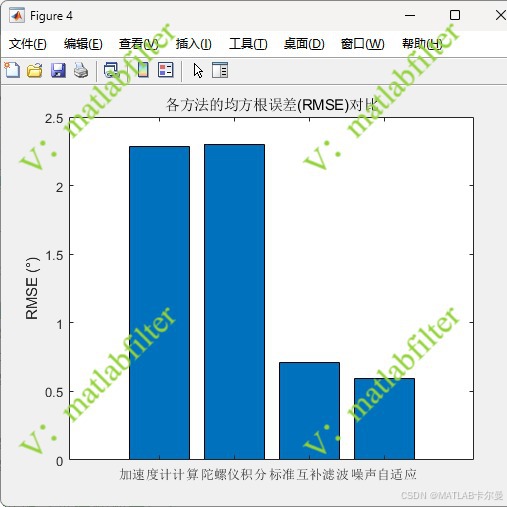
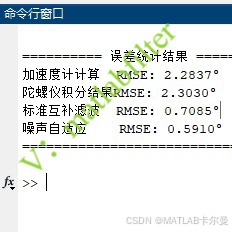
RMSE对比:
MATLAB源代码
完整代码如下:
%% 基于噪声协方差自适应的互补滤波器方法与标准互补滤波对比
% 作者:matlabfilter,接定位与导航相关的代码定制与讲解
% 2025-10-26/Ver1
clear
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 351
351

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











