




本文给出论文《基于Taylor-Chan算法的改进UWB室内三维定位方法》中的Taylor算法来解算TOA的复现程序(MATLAB)。
使用论文中给定的12个锚点/360个测试的标签用来测试算法性能
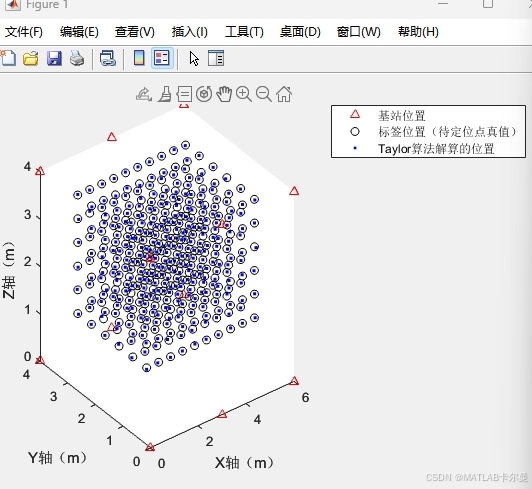
运行结果
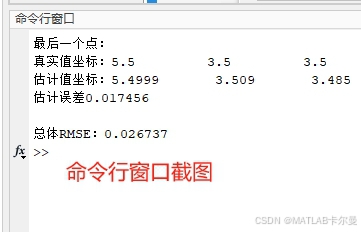
误差输出:
程序介绍
本程序基于 Taylor 迭代算法,实现了对三维空间内360个目标点的 TOA(Time of Arrival)定位解算,共配置 12个基站(锚点),支持仿真定位精度评估、误差可视化与迭代过程分析。
该方法参考文献《基于Taylor-Chan算法的改进UWB室内三维定位方法》,适用于室内超宽带(UWB)定位、导航系统等领域。
🧠 核心功能概述
| 功能模块 | 描述 |
|---|---|
| 基站配置 | 12 个固定基站,分布于 3 × 2 × 2 3\times2\times2 3×2×2 的三维空间立方体顶点。 |
| 标签点生成 | 在 x ∈ [ 1 , 5.5 ] , y ∈ [ 1 , 3.5 ] , z ∈ [ 1 , 3.5 ] x\in[1,5.5],y\in [1,3.5],z\in[1,3.5] x∈[1,5.5],y∈[1,3.5],z∈[1,3.5]范围内以 0.5m 网格生成 360 个测试点。 |
| TOA建模 | 利用三维欧氏距离模拟从标签到各基站的传播时间,加入高斯白噪声模拟测距误差: r i = ∣ p − s i ∣ + N ( 0 , σ 2 ) r_i = | \mathbf{p} - \mathbf{s}_i | + \mathcal{N}(0, \sigma^2) ri=∣p−si∣+N(0,σ2) |
| Taylor迭代定位 | 以基站位置均值作为初始值,构造雅可比矩阵进行迭代更新: p k + 1 = p k + ( A T A ) − 1 A T B \mathbf{p}_{k+1} = \mathbf{p}_k + (\mathbf{A}^T\mathbf{A})^{-1} \mathbf{A}^T \mathbf{B} pk+1=pk+(ATA)−1ATB 直至误差小于阈值 $\varepsilon$。 |
| 误差统计 | 计算所有标签点的估计误差,并输出 RMSE(均方根误差),分析算法整体精度。 |
| 可视化结果 | 生成 3D 图像,展示基站位置、标签真值与估计点;同时绘制 Taylor 迭代收敛误差曲线。 |
📊 结果输出
- 每个点定位误差(最后一个点)
- 所有点定位 RMSE: RMSE = 1 N ∑ i = 1 N ∥ p ^ i − p i ∥ 2 \text{RMSE} = \sqrt{\frac{1}{N} \sum_{i=1}^N \| \hat{\mathbf{p}}_i - \mathbf{p}_i \|^2} RMSE=N1∑i=1N∥p^i−pi∥2
- 迭代误差收敛曲线
📁 应用场景
- 室内 UWB 定位系统建模
- 导航/无人系统仿真教学
- TOA 定位算法性能对比
- 三维定位精度评估实验
MATLAB源代码
部分代码如下:
% Taylor方法解算TOA,定位三维目标、12个锚点/360个测试的标签
% 参考文献:《基于Taylor-Chan算法的改进UWB室内三维定位方法》
% 2025-07-05/Ver1
%% 初始化与
clc;clear;close all;
rng(0);
% 定义参数和待测点位置
num_stations = 12; % 基站数量(锚点数量)
std_var1 = 1e-10; %TOA时间误差(标准差)
% 固定基站位置
stations_position = [
0,0,0;
3,0,0;
6,0,0;
0,4,0;
3,4,0;
6,4,0;
0,0,4;
3,0,4;
6,0,4;
0,4,4;
3,4,4;
6,4,4]; %按论文的基站坐标设置
c = 3e8;
% =====生成待定位点坐标=====
% 定义坐标范围
x = 1 : 0.5 : 5.5; % 共10个,原论文有误
y = 1 : 0.5 : 3.5; % 共6个,原论文有误
z = 1 : 0.5 : 3.5; % 共6个,原论文有误
完整代码下载链接:
https://download.youkuaiyun.com/download/callmeup/91327939
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 197
197

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











