







基于扩展卡尔曼滤波(EKF)的 INS 与 DVL 融合仿真系统
原创代码,非AI生成,包运行成功,请勿翻卖
程序简介
本程序基于扩展卡尔曼滤波(EKF)的 INS/DVL 速度融合仿真框架,用于三维空间中载体速度估计与轨迹重构。程序以三轴速度作为系统状态,通过构造非线性速度演化模型与线性速度观测模型,模拟惯性导航系统( I N S INS INS)速度积分漂移与多普勒测速仪( D V L DVL DVL)速度测量噪声并存的典型导航场景,并利用 E K F EKF EKF对速度状态进行实时校正。
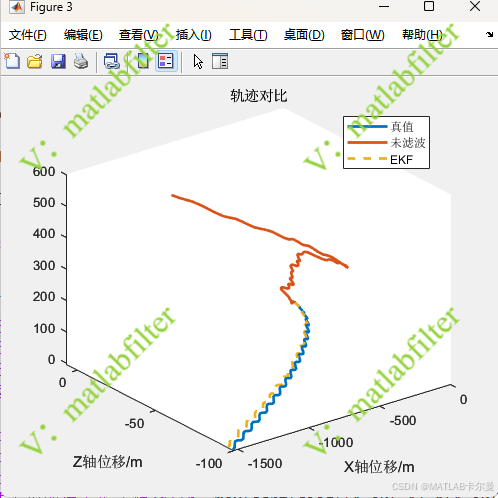
在此基础上,通过对速度进行时间积分,进一步给出三维位移轨迹,对比分析真实轨迹、未滤波轨迹与 EKF 融合轨迹的误差特性,从而直观验证 EKF 在 I N S / D V L INS/DVL INS/DVL融合中的误差抑制能力。
程序特点与适用场景
-
结构清晰,完整覆盖 INS/DVL 融合的核心计算流程
-
直接体现 INS 漂移累积与 DVL 约束修正的物理意义
-
支持从速度层面到轨迹层面的多维度性能分析
-
可作为:
- INS/DVL 融合算法教学示例
- 水下导航、无人平台速度融合原型验证
- 后续扩展至姿态耦合、自适应滤波或鲁棒滤波研究的基础框架
运行结果
三维轨迹对比,能看到EKF的轨迹更接近真值:
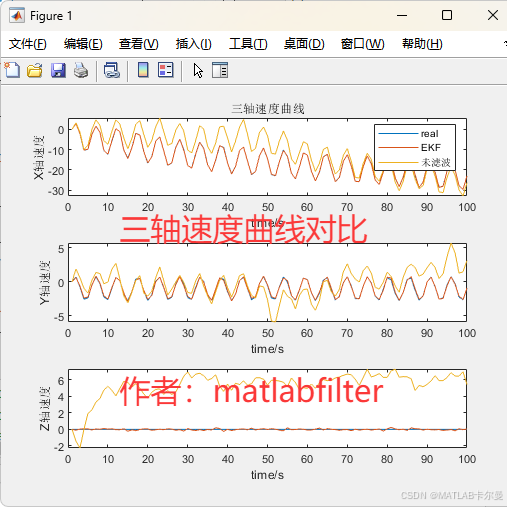
速度曲线对比:
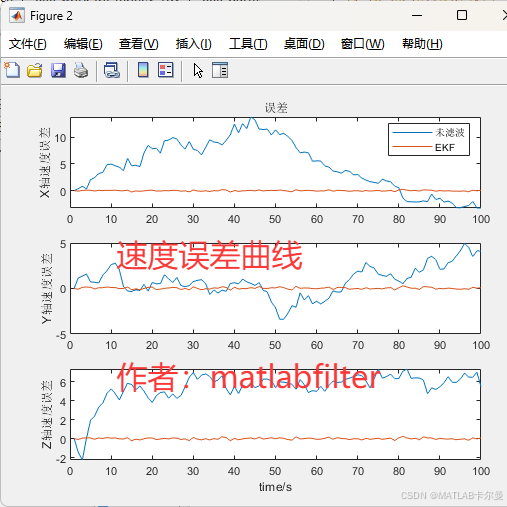
速度误差曲线对比:
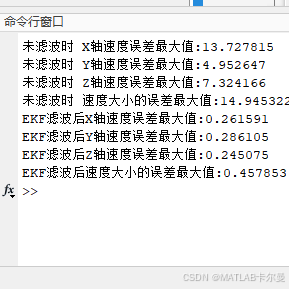
命令行输出的结果:
MATLAB源代码
部分代码如下:
% EKF融合INS与DVL的核心程序,三维
% 作者:matlabfilter(V同号,可接代码定制、讲解与调试)
% date: 2024-03-23
% Ver1
% 2025-12-31/Ver2:优化输出、添加轨迹
clear;clc;close all;
rng(0); %注释此行可以在每次运行时使用不同的随机数
%% 滤波模型初始化
t = 1:1:100;
Q = 0.4*diag([1,1,1]);w=sqrt(Q)*randn(size(Q,1),length(t));
R = 0.1^2*diag([1,1,1]);v=sqrt(R)*randn(size(R,1),length(t));
P0 = 1*eye(3);
X=zeros(3,length(t)); %构建滤波状态量(三轴速度)
X_ekf=zeros(3,length(t)); %构建滤波后的输出状态
X_ekf(1,1)=X(1,1);
Z=zeros(3,length(t)); %定义观测值形式
Z(:,1)=[X(1,1);X(2,1);X(3,1)]+v(:,1); %观测量——对三轴速度进行观测
完整代码的下载链接:
https://download.youkuaiyun.com/download/callmeup/92520159
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 404
404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











