



简介
本文对基于Taylor-Chan算法的UWB三维定位代码的复现过程与讲解,结合算法原理与实现细节进行分步解析。
程序复现过程
以下是对基于Taylor-Chan算法的UWB三维定位代码的复现过程与讲解,结合算法原理与实现细节进行分步解析:
算法原理概述
该代码实现了Taylor-Chan融合定位算法,结合了Taylor级数展开法的高精度迭代特性和Chan算法的最小二乘全局收敛优势。核心思想是:
- Chan算法提供初始位置估计:通过构造非线性方程组的加权最小二乘解,快速获得全局近似解。
- Taylor算法进行局部优化:以Chan的输出为初值,通过迭代线性化过程逼近真实位置。
- 异常值筛选机制:基于残差分析筛选可靠基站,提高NLOS(非视距)环境下的定位精度。
代码复现过程
- 初始化与参数设置
clc;clear;close all; rng(0);
num_stations = 12; % 12个基站三维布局
stations_position = [0,0,0; 3,0,0; ... ]; % 按论文布局
std_var2 = 1e-10*[1,1,..10,..1]'; % 模拟2个NLOS基站
- 基站布局:采用3D立方体分布(0-6m范围),符合典型室内定位场景。
- 误差模型:设置两个基站的高方差(10倍)模拟NLOS效应。
- 待测点生成
x = 1:0.5:5.5; y=1:0.5:3.5; z=1:0.5:3.5;
[X,Y,Z] = meshgrid(x,y,z); positions = [X(:), Y(:), Z(:)];
生成360个测试点(10×6×6网格),覆盖基站网络中心区域,避免边缘效应。
- TOA测距建模
delta = ones(num_stations,1)*position - stations_position;
r_ideal = sqrt(sum(delta.^2,2)); % 理想距离
r = r_ideal + std_var2.*randn(size(r_ideal))*c; % 添加噪声
通过理想距离+高斯噪声模拟TOA测量值,其中c=3e8为光速。
- Taylor算法迭代
position_est = [1,1,1]'; % 初始估计
for i1 = 1:100
B = estimated_distance - measured_distance; % 残差向量
A = [∂x/∂d, ∂y/∂d, ∂z/∂d]; % 雅可比矩阵
Delta = (A'*A)\A'*B; % 最小二乘解
position_est += Delta; % 更新估计
end
- 雅可比矩阵:由几何偏导数构成,反映位置变化对距离的影响。
- 迭代终止条件:Δ的模长小于阈值ε=0.01。
. Chan算法求解
通过两步加权最小二乘估计目标坐标,处理TDOA方程的非线性。
- Taylor-Chan融合策略
- 残差阈值J:动态计算为平均相对误差的100倍,用于排除NLOS影响。
- 二次定位:仅使用可靠基站重新运行Chan算法,提升精度。
关键代码解析
- 异常值筛选逻辑
通过动态阈值识别异常测量值,比固定阈值更适应复杂环境。
- Chan算法符号判断
position_est_Chan = sign(Z_alpha1(1:3)) .* sqrt(abs(Z_alpha2));
由于平方根导致符号丢失,通过Chan第一阶段解的符号确定坐标方向。
- 可视化与误差分析
figure; plot3(...); % 3D位置分布
figure; plot(norm_err...); % 误差曲线
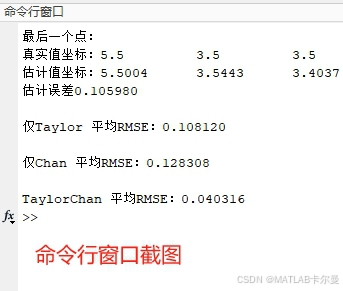
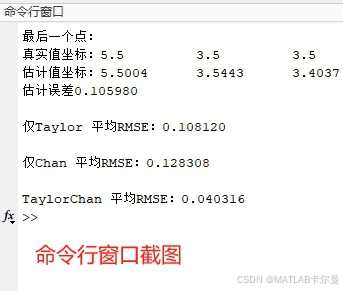
fprintf('TaylorChan 平均RMSE:%f\n',rms(...));
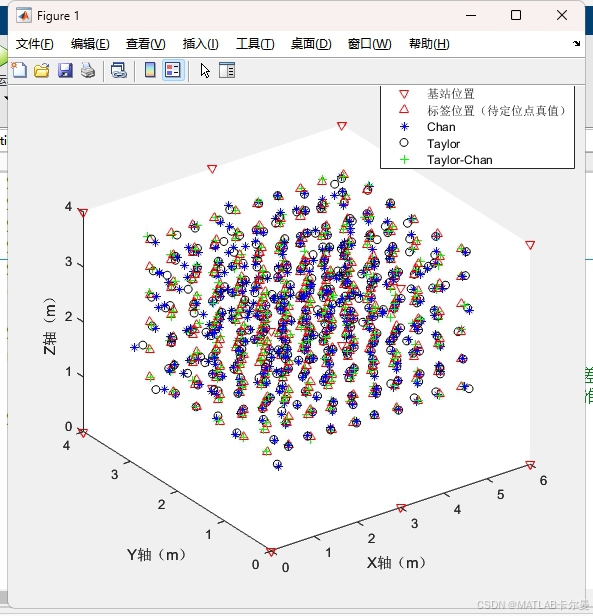
- 3D散点图:直观展示各算法定位结果的空间分布。
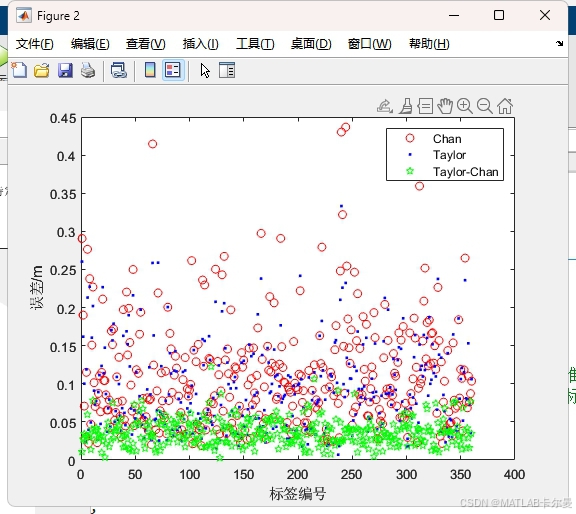
- 误差曲线:对比三种算法的逐点误差,突出融合算法优势。
源代码有注释,未完全标注的算法细节可以在代码里面看
运行结果
定位结果示意图:
各标签定位误差对比:
命令行窗口输出的RMSE:
matlab代码
代码的结构如下:
部分代码内容:
% TaylorChan方法解算TOA,定位三维目标、12个锚点/360个测试的标签
% 参考文献:《基于Taylor-Chan算法的改进UWB室内三维定位方法》
% 作者:matlabfilter
% 2025-07-10/Ver1:从旁边的纯Taylor算法而来
%% 初始化与
clc;clear;close all;
rng(0);
% 定义参数和待测点位置
num_stations = 12; % 基站数量(锚点数量)
std_var1 = 1e-10*[1,1,1,1,1,1,1,1,1,1,1,1]'; %TOA时间误差(标准差)
std_var2 = 1e-10*[1,1,1,1,1,10,1,1,1,10,1,1]'; %TOA时间误差(标准差)【有两个点NLOS的情况】
% 固定基站位置
stations_position = [
0,0,0;
3,0,0;
6,0,0;
0,4,0;
3,4,0;
6,4,0;
0,0,4;
3,0,4;
6,0,4;
0,4,4;
3,4,4;
6,4,4]; %按论文的基站坐标设置
c = 3e8;
% =====生成待定位点坐标=====
% 定义坐标范围
x = 1 : 0.5 : 5.5; % 共10个,原论文有误
y = 1 : 0.5 : 3.5; % 共6个,原论文有误
z = 1 : 0.5 : 3.5; % 共6个,原论文有误
% 生成网格
[X, Y, Z] = meshgrid(x, y, z); % X为横坐标,Y为纵坐标
positions = [X(:), Y(:), Z(:)]; % 共360行,每行一个标签点的[x, y]坐标
c = 3e8;
完整代码:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 197
197

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











