




本文介绍一个基于Chan方法的三维目标定位算法的MATLAB例程,通过时间到达(TOA)测量来定位多个锚点(基站)周围的未知点。
参考论文名称:《基于Taylor-Chan算法的改进UWB室内三维定位方法》
程序介绍
这段 MATLAB 代码实现了基于 Chan 方法的三维目标定位算法,通过时间到达(TOA)测量来定位多个锚点(基站)周围的未知点。该算法适用于室内定位,利用多个基站的信号来精确确定目标位置。
主要部分
-
初始化:
- 清空工作区,设置随机数种子以确保结果可复现。
- 定义基站数量、TOA 时间误差,以及固定的基站位置,采用论文中给出的坐标。
-
生成待定位点坐标:
- 通过
meshgrid函数生成三维空间中的待定位点坐标,形成一个网格。 - 这些点将在后续的定位过程中被评估。
- 通过
-
TOA 建模:
- 对于每个待定位点,计算其与各基站的距离,并引入随机误差以模拟真实情况。
- 使用加权最小二乘法(WLS)进行位置估计,构建线性方程组来优化未知点位置。
-
误差处理:
- 计算估计位置与真实位置之间的误差,并使用向量范数(norm)来评估误差大小。
- 计算总体均方根误差(RMSE)以量化算法性能。
-
绘图:
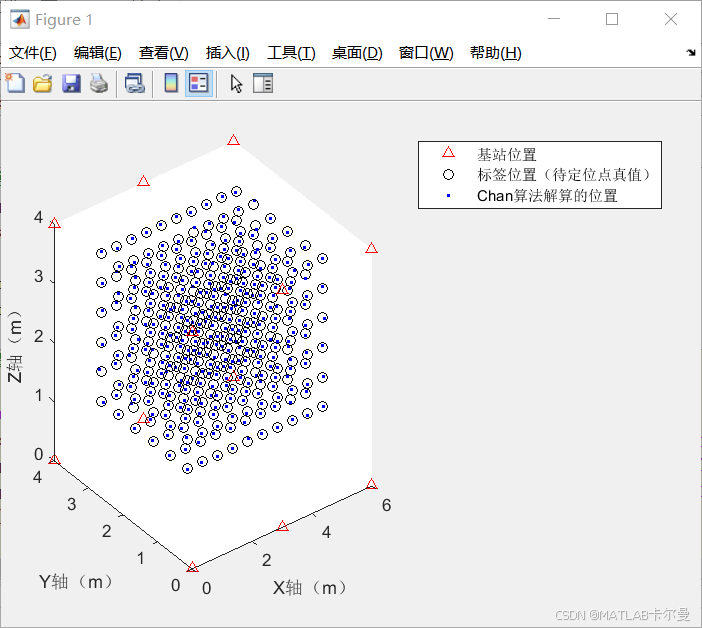
- 通过三维图形展示基站位置、真实位置和估计位置,便于直观理解定位结果。
-
输出结果:
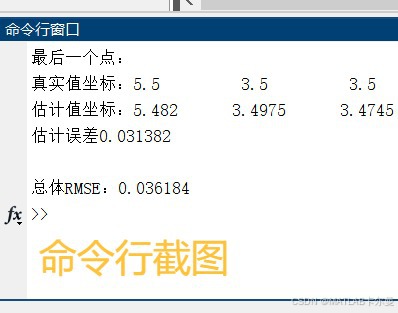
- 打印最后一个待定位点的真实坐标、估计坐标及其误差,同时输出总体 RMSE,便于用户评估算法的精确性。
运行结果
360个标签的真实位置、Chan解算的位置、锚点位置的三维示意图如下:
命令行输出的结果图如下:
部分代码
上述结果对应的部分matlab代码如下:
% Chan方法解算TOA,定位三维目标、N个锚点
% 参考文献:《基于Taylor-Chan算法的改进UWB室内三维定位方法》
% 如需付费讲解,可联系微信:matlabfilter
% 2025-07-06/Ver1
%% 初始化
clc;clear;close all;
rng(0);
% 定义参数和待测点位置
num_stations = 12; % 基站数量(锚点数量)
std_var1 = 1e-10; %TOA时间误差(标准差)
% 固定基站位置
% stations_position = 100*randn(num_stations,3);
stations_position = [
0,0,0;
3,0,0;
6,0,0;
0,4,0;
3,4,0;
6,4,0;
0,0,4;
3,0,4;
6,0,4;
0,4,4;
3,4,4;
6,4,4]; %按论文的基站坐标设置
c = 3e8;
% =====生成待定位点坐标=====
完整代码:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 197
197

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











