




该代码实现了一个 A O A AOA AOA(到达角)与 T O A TOA TOA(到达时间)混合定位的例程,适用于二维平面,并支持自适应基站数量。
订阅专栏后可直接获取完整的源代码,粘贴到MATLAB空脚本中即可运行
代码讲解
功能概述
- 目标:通过 A O A AOA AOA和 T O A TOA TOA两种定位方式,估计目标在二维平面上的位置。
- 输入:随机生成的目标点和基站位置。
- 输出:估计的目标位置、真实位置以及误差信息。
主要步骤
-
初始化:
- 清除工作区,设置随机数种子以保证结果可重复。
- 随机生成目标点的坐标和多个固定基站的位置。
-
定位过程:
- 计算目标到每个基站的真实距离。
- 模拟接收到的 A O A AOA AOA角度信息,并为其添加噪声。
- 计算 T O A TOA TOA测量的时间,添加相应的噪声。
- 构建用于最小二乘法的线性方程组,求解目标位置。
-
最小二乘法求解:
- 构建方程组后,使用最小二乘法计算目标位置的估计值。
- 记录每次估计的结果。
-
绘图:
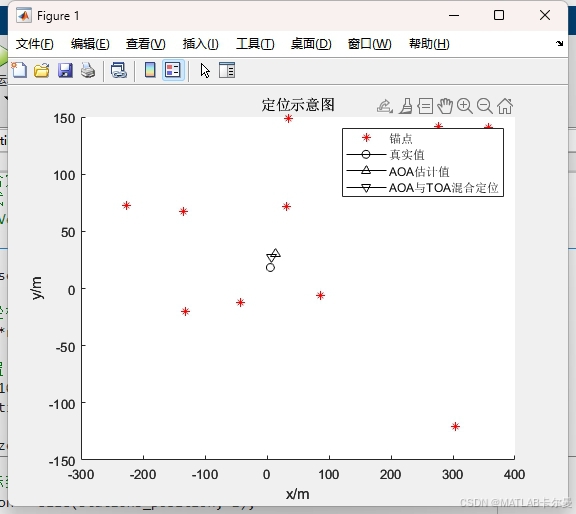
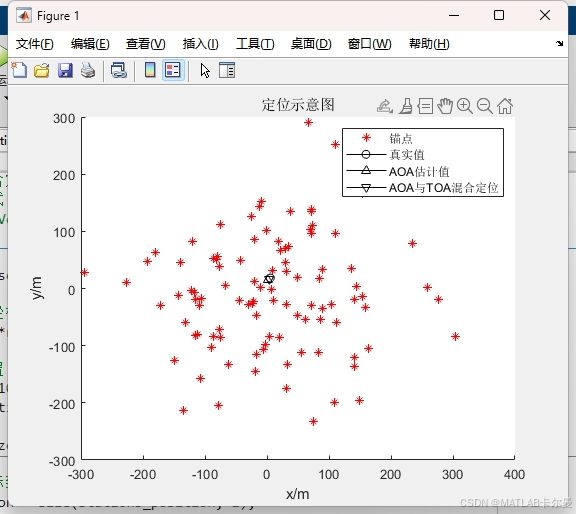
- 将基站位置、真实目标位置及估计位置进行可视化,便于结果分析。
-
输出结果:
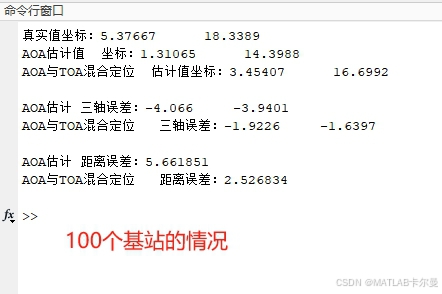
- 打印真实坐标、估计坐标及其误差信息,包括三轴误差和距离误差。
适用场景
该定位算法适用于需要高精度定位的应用场景,如无人驾驶、机器人导航、智能交通等领域。通过结合AOA与TOA,可以克服各自单独使用时的不足,提高定位准确性。
噪声调整
- 代码中使用的噪声参数(AOA和TOA噪声)可以根据实际情况进行调整,以模拟不同环境下的定位性能。
运行结果
10个基站时的定位示意图:
命令行的结果输出:
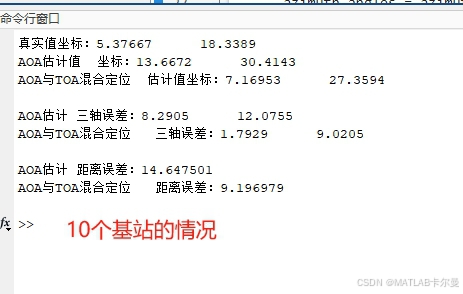
100个基站的情况:
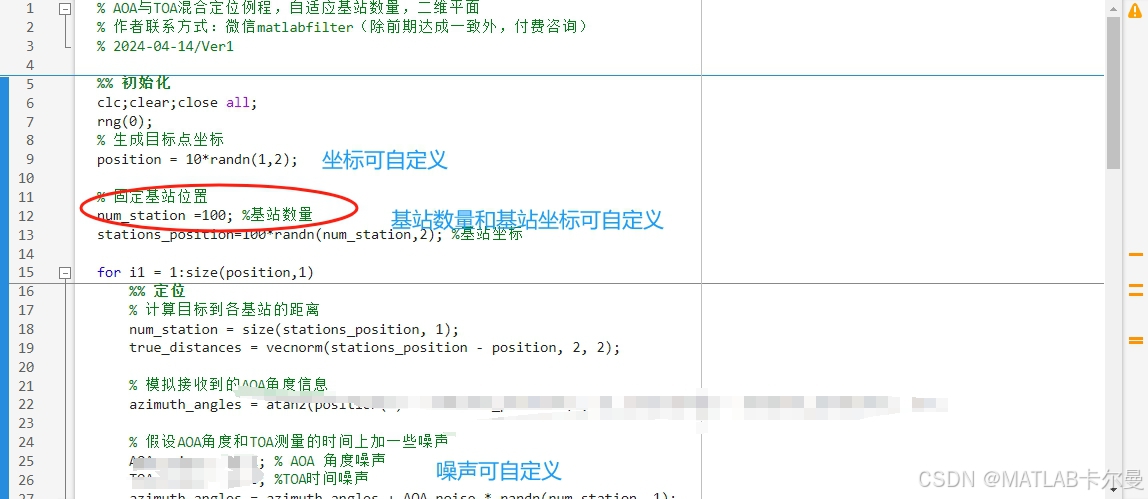
代码中的各项参数可自行调节:
MATLAB源代码
代码结构:
部分代码:
% AOA与TOA混合定位例程,自适应基站数量,二维平面
% 2024-04-14/Ver1
%% 初始化
clc;clear;close all;
rng(0);
% 生成目标点坐标
position = 10*randn(1,2);
% 固定基站位置
num_station =100; %基站数量
stations_position=100*randn(num_station,2); %基站坐标
for i1 = 1:size(position,1)
%% 定位
% 计算目标到各基站的距离
num_station = size(stations_position, 1);
true_distances = vecnorm(stations_position - position, 2, 2);
% 模拟接收到的AOA角度信息
azimuth_angles = ...;
代码运行演示视频:
AOA定位、AOA与TOA混合定位,二维环境下的对比,基站(
代码下载链接:
https://download.youkuaiyun.com/download/callmeup/90631274
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 257
257

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











