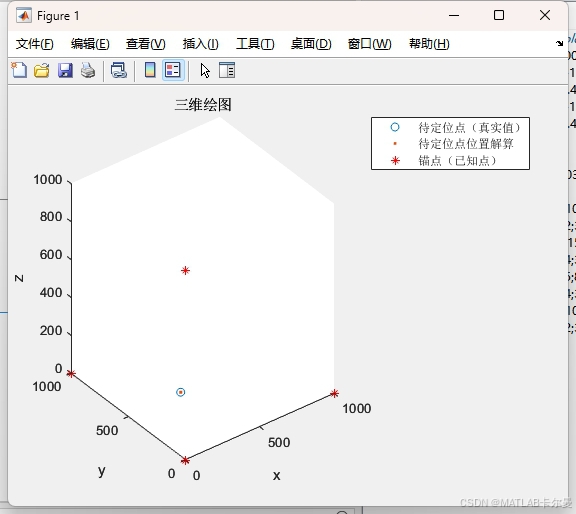
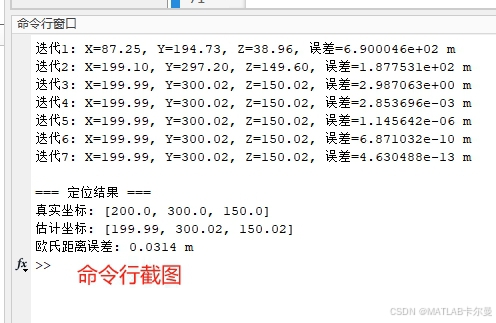
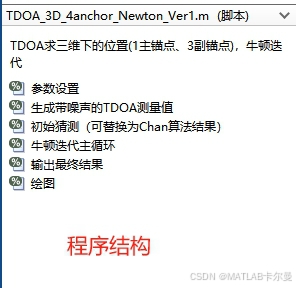
本问所介绍的代码通过TDOA(到达时间差)方法,结合牛顿迭代算法,实现了三维空间内目标位置的定位。系统包含1个主锚点和3个副锚点,通过测量信号到达各基站的时间差计算距离差,最终迭代求解目标坐标。订阅专栏后可以获得完整的MATLAB代码,粘贴到空脚本中即可运行 文章目录 运行结果 MATLAB源代码 代码讲解 核心步骤 关键特性 应用场景 运行结果 定位示意图(定位结果展示): 命令行结果截图: 程序结构: MATLAB源代码 下述代码粘贴到空脚本中即可运行: % TDOA求三维下的位置(1主锚点、3副锚点),牛顿迭代 % 2025-04-19/Ver1 clear;clc;close all; %% 参数设
 1100
1100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










 订阅专栏 解锁全文
订阅专栏 解锁全文

























