





结合鲁棒卡尔曼滤波与欺骗攻击检测的MATLAB代码,包含动态模型、攻击注入和弹性状态估计功能,
代码可直接运行,附有详细的注释
文章目录
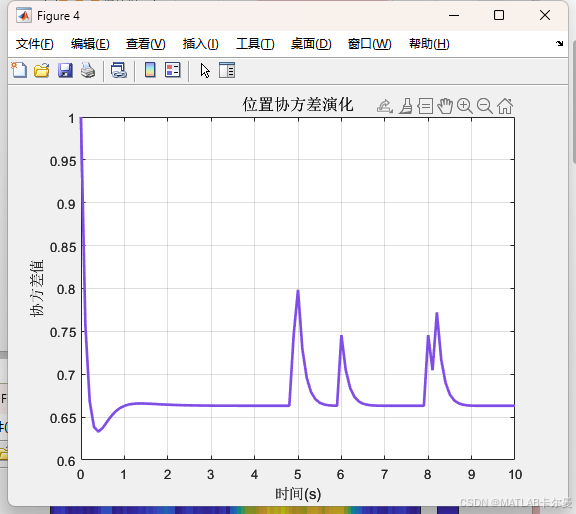
运行结果



MATLAB源代码
以下是一段结合鲁棒卡尔曼滤波与欺骗攻击检测的MATLAB代码,包含动态模型、攻击注入和弹性状态估计功能,代码可直接运行并包含详细注释:
% 基于鲁棒卡尔曼滤波的弹性状态估计与欺骗攻击检测
% 作者:matlabfilter
% 2025-04-07/Ver1
clc; clear; close all;
rng(0);
%% 参数初始化
dt = 0.1; % 时间步长
T = 10; % 总时长
t = 0:dt:T; % 时间序列
N = length(t); % 数据点数
% 系统模型(二维匀速运动)
F = [1 dt 0 0; % 状态转移矩阵
0 1 0 0;
0 0 1 dt;
0 0 0 1];
H = [1 0 0 0; % 观测矩阵
0 0 1 0];
% 噪声参数
Q = diag([0.1, 0.1, 0.1, 0.1]); % 过程噪声协方差
R = diag([1, 1]); % 观测噪声协方差
% 欺骗攻击参数
attack_start = 50; % 攻击开始时刻
attack_duration = 30; % 攻击持续时间
attack_magnitude = [5; 3]; % 攻击幅度[X方向,Y方向]
%% 生成真实轨迹与带噪声观测
true_states = zeros(4,N);
measurements = zeros(2,N);
% 初始状态
true_states(:,1) = [0; 1; 0; 0.5];
% 生成状态序列
for k = 2:N
true_states(:,k) = F * true_states(:,k-1) + sqrtm(Q)*randn(4,1);
end
% 添加观测噪声 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 489
489

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











