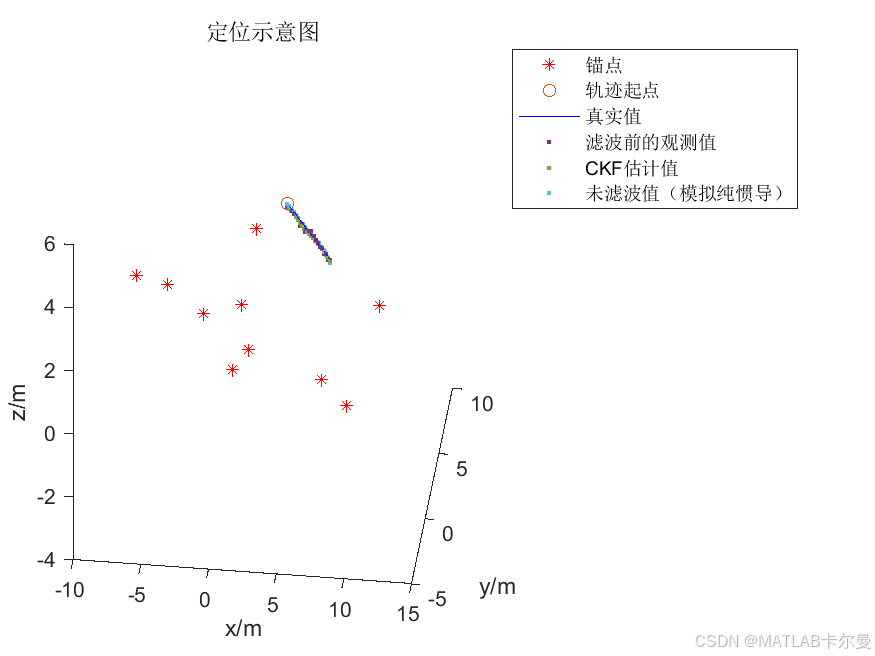
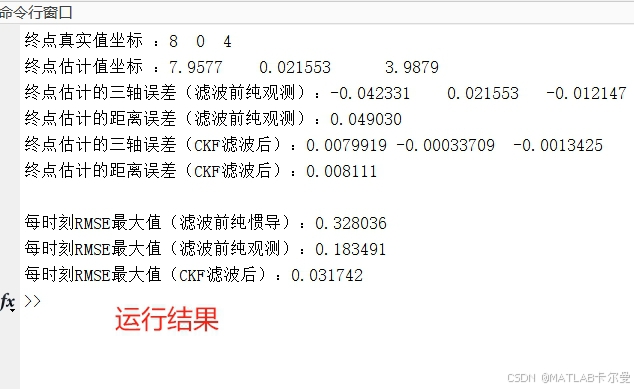
本文所述的代码实现基于TDOA(到达时间差)的三维目标定位,采用两步加权最小二乘法进行初步估计,再通过容积卡尔曼滤波(CKF)对轨迹进行滤波优化。本专栏为付费专栏,订阅后可查看多种定位与滤波的程序,提供完整的源代码 文章目录 运行结果 MATLAB代码 代码讲解 一、代码概述 二、初始化模块 三、TDOA建模与定位 1. 生成理想距离与含噪测量值 2. 两步加权最小二乘估计 四、CKF滤波模块 1. 状态与观测模型 2. 容积卡尔曼滤波流程 五、结果可视化与误差分析 1. 三维轨迹图 2. 误差分析 六、关键参数与改进建议 运行结果 运行结果演示视频: TDOA三维N锚点CKF滤波结果视频 定位结果: 误差曲线: 命令行的数值输出:







 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








