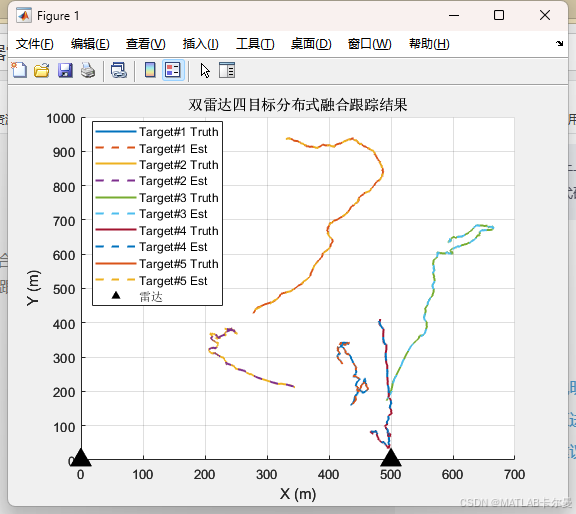
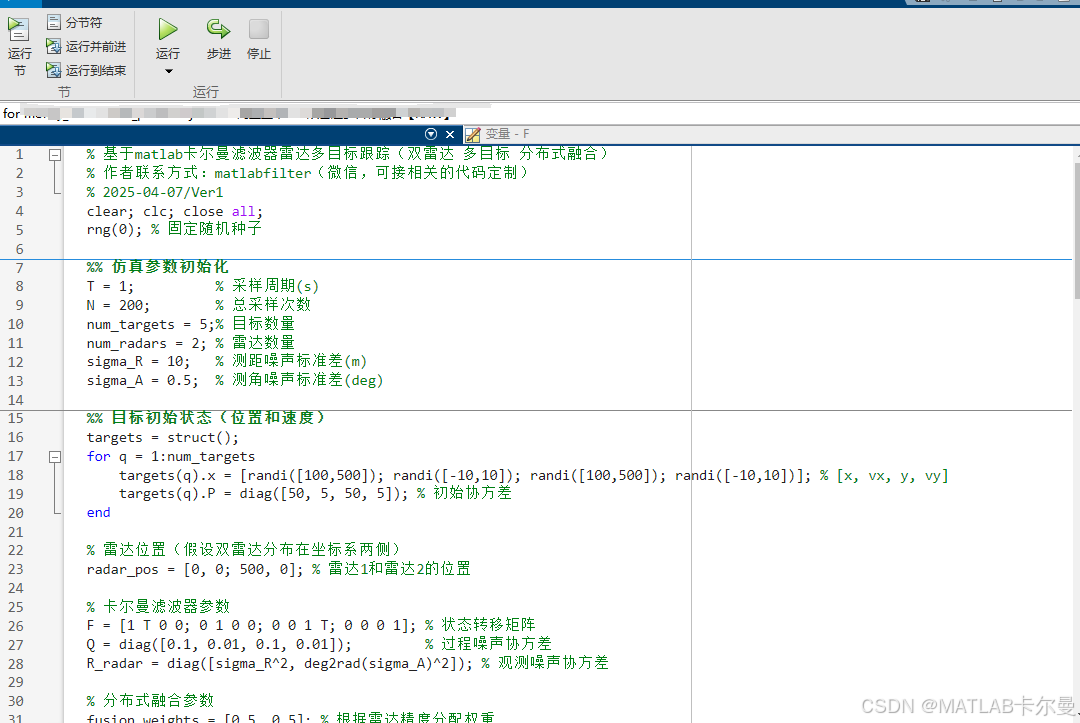
本文给出一个基于卡尔曼滤波器的双雷达四目标分布式融合跟踪的MATLAB代码框架,结合了TDOA/FDOA观测模型和分布式融合逻辑。代码参考了搜索结果中的多目标跟踪、分布式MIMO雷达优化及卡尔曼滤波实现方法。 文章目录 运行结果 MATLAB代码 代码说明 关键改进点 扩展建议 运行结果 部分代码呈现&运行界面截图: MATLAB代码 完整代码如下: % 基于matlab卡尔曼滤波器雷达多目标跟踪(双雷达 多目标 分布式融合) % 作者:matlabfilter % 2025-04-07/Ver1 clear; clc; close all; rng(0
 2922
129
2922
129

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










 订阅专栏 解锁全文
订阅专栏 解锁全文

























