




文章所述的代码实现了基于最大相关熵准则(MCC)的三维鲁棒卡尔曼滤波算法(MCC-KF),针对传感器观测数据中存在的脉冲型异常噪声问题,通过非线性加权机制提升滤波器的抗干扰能力。代码通过对比传统KF与MCC-KF在含异常值场景下的表现,验证了后者在状态估计鲁棒性方面的显著优势。
订阅专栏后即可直接查看源代码
文章目录
运行结果
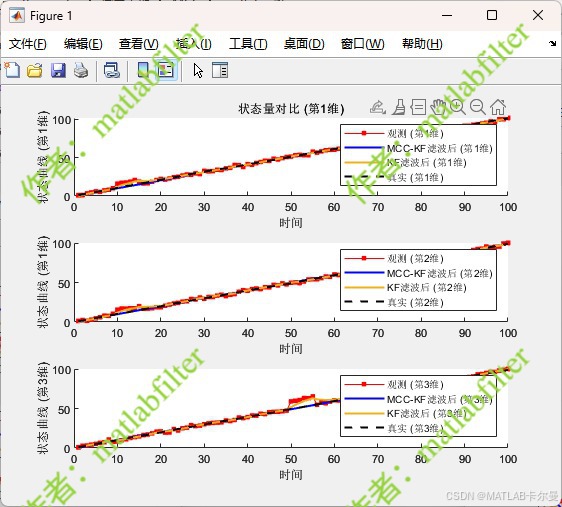
三轴的状态量曲线:
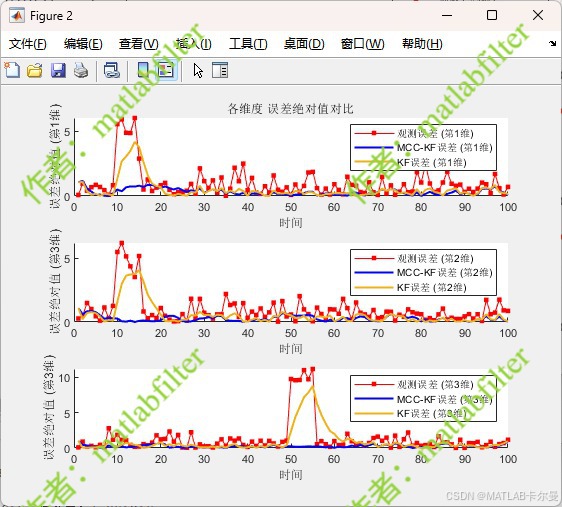
误差曲线:
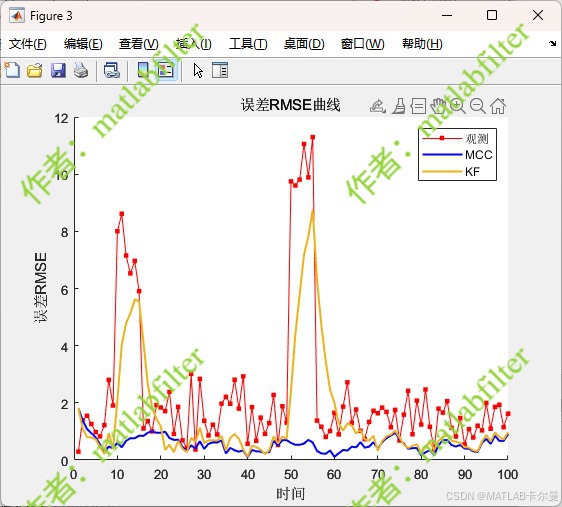
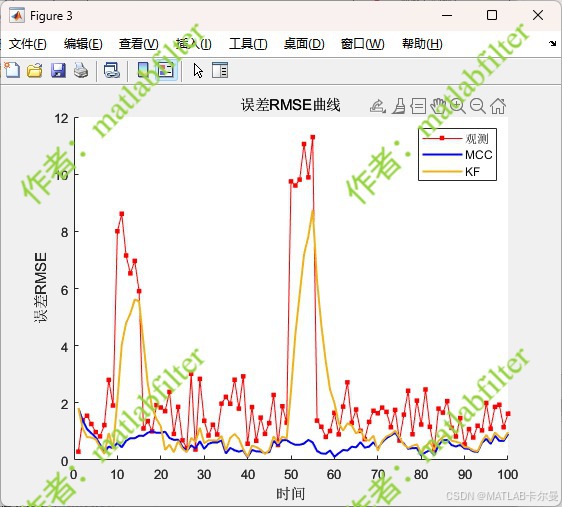
RMSE曲线:
误差统计特性(在命令行输出):
MATLAB源代码
源代码如下,粘贴到MATLAB空脚本即可直接运行:
% 关于MCC(最大相关熵)的三维卡尔曼滤波例程,用于解决观测噪声的异常
% 2025-06-07/Ver1
% 2025-06-
 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











