





针对GPS拒止环境下UGV高精度定位难题,提出基于UAV辅助的协同定位解决方案。通过建立精确的相对观测模型、设计鲁棒的多源信息融合算法、改善UGV定位精度
研究背景与意义
研究背景
随着无人系统在智能交通、搜救救援、精准农业、环境监测等领域的广泛应用,无人地面车辆(UGV)的精确定位成为制约其自主作业能力的关键瓶颈。传统的GPS定位系统在城市峡谷、森林遮蔽、室内环境等复杂场景下存在信号遮挡、多路径效应等问题,定位精度往往难以满足厘米级精度需求。
无人机(UAV)凭借其机动性强、视野开阔的优势,可以在空中对地面目标进行高精度观测。将UAV与UGV进行协同,通过空地信息融合实现互补定位,为解决复杂环境下的高精度定位问题提供了新的技术途径。
研究意义
理论意义:
- 探索空地异构平台协同定位的理论框架和数学模型
- 研究多源异构信息融合的最优估计算法
- 建立考虑通信延迟和数据丢失的鲁棒定位方法
应用价值:
- 提升GPS拒止环境下UGV的定位精度和可靠性
- 降低对昂贵高精度定位设备的依赖
- 为无人系统集群协同作业提供技术支撑
- 推动智能交通、应急救援等领域的技术进步
国内外研究现状
- MIT:开发了基于视觉的UAV-UGV协同SLAM系统,实现室内环境下的厘米级定位
- 苏黎世联邦理工学院:提出分布式卡尔曼滤波架构,支持多UAV协同定位
- 佐治亚理工学院:研究了通信受限下的协同定位优化策略
- 清华大学:研究了城市环境下UAV辅助的车辆定位技术
- 北京航空航天大学:开发了基于UWB的空地协同定位系统
- 国防科技大学:提出了考虑动态遮挡的鲁棒协同定位算法
存在的问题
- 多源信息融合的实时性和准确性难以平衡
- 动态环境下测量异常值的鲁棒处理不足
- 通信延迟和带宽限制对定位性能影响缺乏系统研究
- 缺乏标准化的性能评估体系和测试平台
研究内容与技术路线
(1)UAV-UGV相对观测模型建立
研究目标: 建立考虑UAV姿态、相机畸变、大气折射的精确测量模型
技术方案:
- 基于相机几何的距离-角度测量模型
- 考虑UAV高度的三维空间定位
- 测量噪声特性分析与建模
关键方程:
真实距离: d = √(Δx² + Δy² + h²)
平面距离: d_plane = √(d² - h²)
方位角: θ = atan2(Δy, Δx)
(2)多源信息融合算法设计
研究目标: 设计高效鲁棒的扩展卡尔曼滤波(EKF)融合算法
状态空间模型:
- 状态向量:x = [x, y, vx, vy]ᵀ
- 观测向量:包含UAV相对测量和GPS绝对测量
- 融合策略:序贯更新 vs 集中式融合
算法流程:
- 预测步骤:基于运动模型预测UGV状态
- UAV测量更新:融合相对高精度观测
- GPS测量更新:引入绝对位置参考
- 协方差更新:维护估计不确定性
核心代码实现:
% 卡尔曼滤波预测
x_pred = F * x + B * u
P_pred = F * P * F' + Q
% UAV测量更新
K_uav = P_pred * H' * inv(H * P_pred * H' + R_uav)
x_uav = x_pred + K_uav * (z_uav - H * x_pred)
% GPS测量更新
K_gps = P_uav * H' * inv(H * P_uav * H' + R_gps)
x_est = x_uav + K_gps * (z_gps - H * x_uav)
(3)协同轨迹规划与优化
研究目标: 优化UAV飞行轨迹以最大化定位精度
优化目标:
- 最小化定位误差协方差的迹
- 保证观测几何的良好构型(GDOP优化)
- 满足UAV飞行约束(速度、转弯半径)
数学表达:
min J = ∫ trace(P(t)) dt
s.t. ||v|| ≤ v_max
|ω| ≤ ω_max
观测距离约束
(4)鲁棒性与容错机制
研究内容:
- 测量异常检测:卡方检验、马氏距离
- 通信丢包处理:预测补偿、降级策略
- 多假设跟踪:处理数据关联不确定性
异常检测准则:
innovation = z - H * x_pred
S = H * P_pred * H' + R
if innovation' * inv(S) * innovation > chi2_threshold
% 拒绝当前测量
end
MATLAB例程运行结果
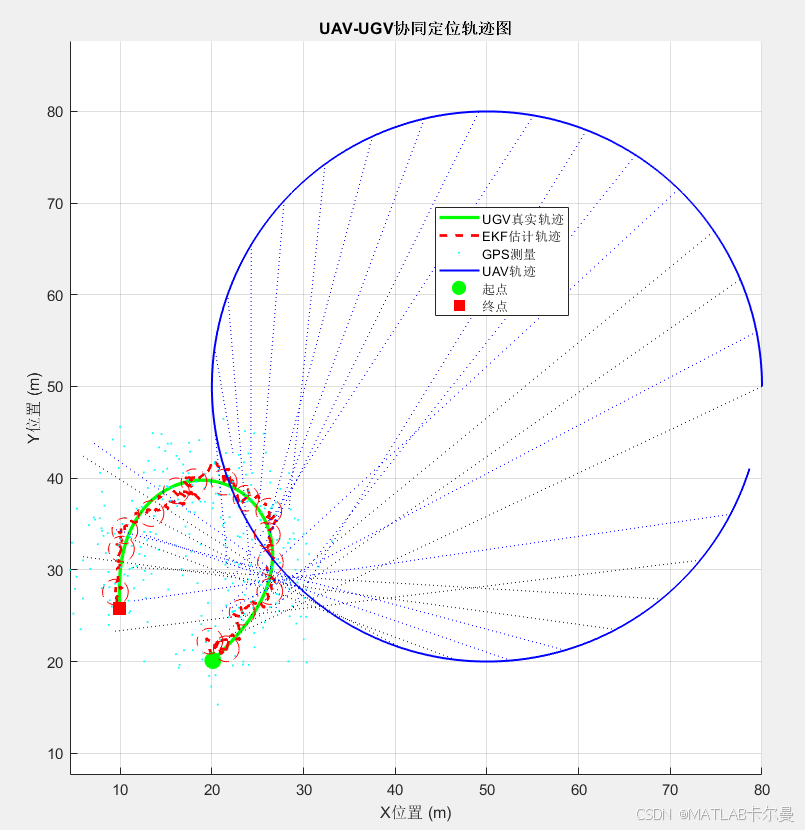
轨迹图:
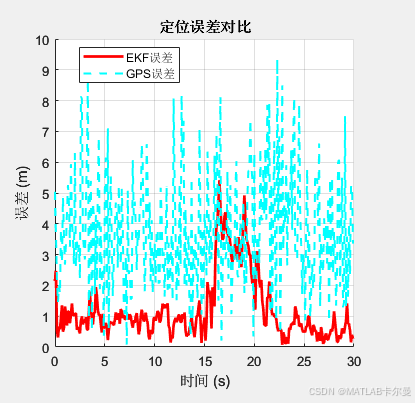
定位误差曲线:
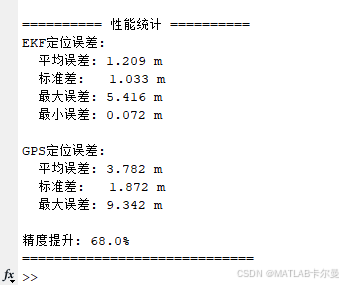
误差统计柱状图:

命令行输出:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 394
394

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











