





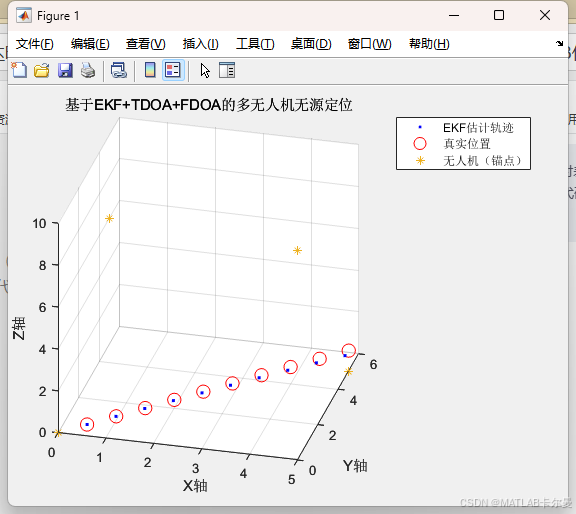
本文给出一个基于扩展卡尔曼滤波(EKF)结合时差定位(TDOA)和频差定位(FDOA)实现多无人机给无源目标定位的Matlab代码。该代码涉及TDOA/FDOA模型设计、EKF非线性滤波逻辑及多传感器数据融合方法。
运行结果
代码框架
% 基于扩展卡尔曼滤波(EKF)结合到达时间(TDOA)、到达频率(FDOA)实现多无人机给单目标定位
% 作者:matlabfilter
% 2025-04-07/Ver1
%% 参数初始化
clear;clc;close all;
T = 1; % 采样周期
N = 10; % 总采样次数
num_drones = 4; % 无人机数量
sigma_T = 1e-3; % TDOA测量噪声标准差
sigma_F = 1e-2;% FDOA测量噪声标准差
% 无人机初始位置和速度(示例数据)
drone_pos = [0, 0, 0;
5, 0, 10;
0, 5, 6;
5, 5, 0]; % 四台无人机的位置(3D)
drone_vel = [0.1, 0.1, 0;
0.1, -0.1, 0;
-0.1, 0.1, 0;
-0.1, -0.1, 0]; % 速度向量
% 目标初始状态(位置和速度)
x_true = [0; 0; 0; 0.5; 0.5; 0.1]; % [x, y, z, vx, vy, vz]
P = diag([10, 10, 10, 1, 1, 1]); % 初始协方差矩阵
Q = diag([0.1, 0.1, 0.1, 0.01, 0.01, 0.01]); % 过程噪声协方差
R = diag([sigma_T^2, sigma_F^2,sigma_T^2, sigma_F^2,sigma_T^2, sigma_F^2]); % 观测噪声协方差
x_est = x_true + 0*randn(6,1); % 初始状态估计
estimated_pos = zeros(6, N);
for k = 1:N
% 预测步骤
[x_pred, F] = ekf_predict(x_est, T, Q, P);
x_true = F*x_true;
X_true(:,k) = x_true;
% 生成仿真数据(TDOA和FDOA测量值)
[z_TDOA, z_FDOA] = generate_measurements(x_true, drone_pos, drone_vel, N, sigma_T, sigma_F);
% 更新步骤(使用TDOA和FDOA观测值)
H = compute_jacobian(x_pred, drone_pos, drone_vel); % 计算雅可比矩阵
z_meas = [z_TDOA( 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 716
716

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











