




 本文介绍组合导航系统,涵盖广义和狭义概念,阐述滤波器原理及互补滤波方法。重点讲解GNSS/INS组合导航的分类,包括松组合、紧组合和深组合的概念与特点。详细解析GNSS/INS松组合算法,如构建系统状态方程、状态方程离散化等,还提及算法实现的注意事项。
本文介绍组合导航系统,涵盖广义和狭义概念,阐述滤波器原理及互补滤波方法。重点讲解GNSS/INS组合导航的分类,包括松组合、紧组合和深组合的概念与特点。详细解析GNSS/INS松组合算法,如构建系统状态方程、状态方程离散化等,还提及算法实现的注意事项。
文章目录
组合导航系统
组合导航的概念
广义
任何两种及以上导航定位手段的组合
◼交汇定位:GNSS、Loran、
◼ 推算导航:INS、里程推算
◼ 匹配定位:地形、视觉、道路、地磁/重力匹配
狭义
至少含有一种推算导航手段
◼ GNSS/INS
◼ GNSS/车载DR
◼ 早期航海、航空
◼ 生物/人类导航
什么是滤波器
1.滤波就是从混合在一起的诸多信号中提取出所需的信号
2.滤波器必须知道待处理(分离)信号的明显特征(如模型)

3.滤波器估计信号s,需要预先知道信号s和噪声n的统计特性
◼ 如果s为低频信号,而n为高频噪声,那么设计相应的低通滤波就可以过滤掉噪声n,分离出信号s
◼ 必须知道信号s的特性
互补滤波
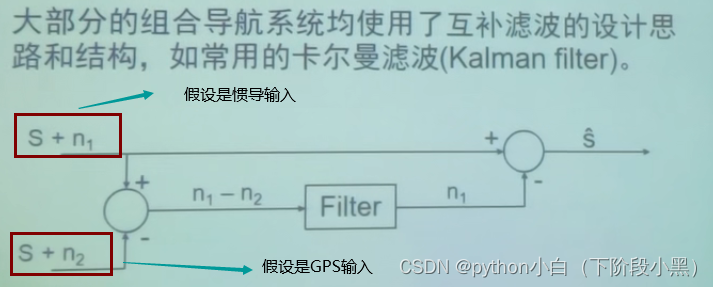
对上述图流程进行解释:
1.现在假设有两种导航定位手段:上面的是惯导的,真实位置s,n1是它的误差,这个定位误差是逐渐累计、逐渐增长、缓慢变大的;下面的是GPS的,也是真实位置加上n2,但是精度水平稳定,不发散。
2.不直接对信号和噪声进行滤波,先把两个信息源求差,真实信号实际上就被减掉了,剩下的就是两个信号源的误差的求差,即n1-n2,然后把这个误差的差异送进去进去滤波
3.n1是低频特性,n2是高
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 6107
6107

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











