







 本文介绍了研究生在学习组合导航过程中的心得,重点讨论了惯性导航的原理和误差分析。从加速度计和陀螺仪的基础知识到姿态、速度和位置的更新模型,再到误差补偿和标定,特别是利用Allan方差进行加速度计误差分析。文章还提及了导航系统的复杂性和需要克服的挑战,如误差积累和外部干扰。
本文介绍了研究生在学习组合导航过程中的心得,重点讨论了惯性导航的原理和误差分析。从加速度计和陀螺仪的基础知识到姿态、速度和位置的更新模型,再到误差补偿和标定,特别是利用Allan方差进行加速度计误差分析。文章还提及了导航系统的复杂性和需要克服的挑战,如误差积累和外部干扰。
研究生生涯:历年的所有学习规划总结
终于到了组合导航这一门学科的讲解了,怎得说,经过了SLAM的毒打,静下心研究之后才发现惯导挺有意思的。
目录
组合导航
组合导航是一个比较大的方向,预计会分三次叙述。会从纯惯性、纯视觉、纯GNSS以及后续凉凉组合进行叙述。当我开启这个话题,就意味着研究生的研究彻底到了一个尾声。
一、惯性导航
(此系列图片来源于武汉大学研究生组合导航课程合集武汉大学研究生组合导航课程合集【2022年春】_哔哩哔哩_bilibili)
惯性导航这门课比较麻烦的是各种公式定理,如果用最简单的加速度计模型。就是妥妥的一次积分获得速度,二次积分获取位置。但是这个结果误差太大了(想想如果加速度计有个干扰,一次积分、二次积分)
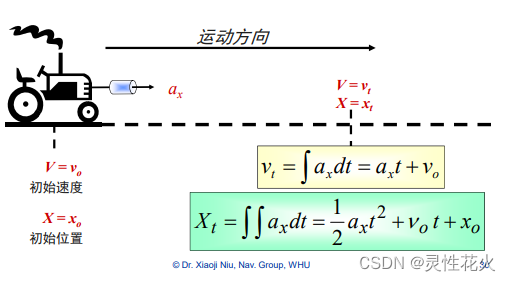
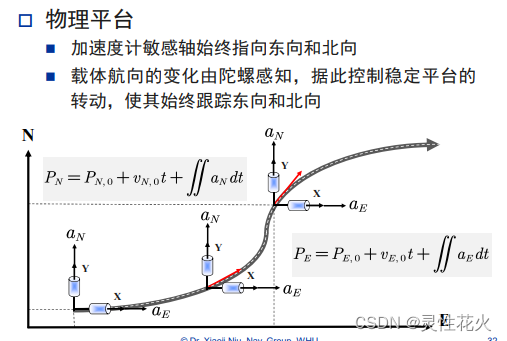
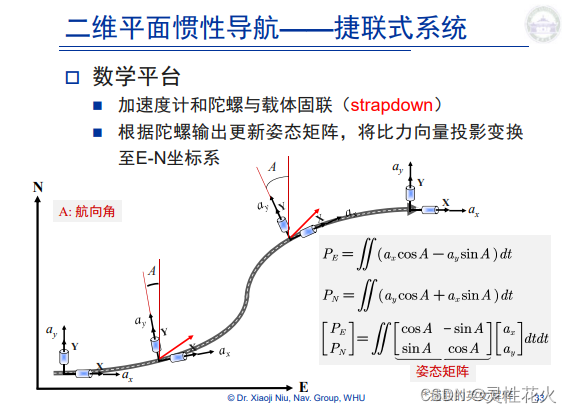
单向运动 二维(平台) 二维(捷联)
总的来说:惯性导航是一门能够非常具有优势的一门导航手段,其他的导航方式或多活少的都需要外界信息来进行处理,但是惯性导航仅仅依赖自身就能实现导航(虽然累计误差比较麻烦)
简单来说惯性导航里面内嵌了两个设备:陀螺仪及速度计。
就依靠这两个设备解算来实现导航。陀螺仪和加速度计对于最基本的模型来说,你完全都可以不理解,只需要知道一个惯导设备里面上有三轴(三个)加速度计和陀螺仪就可以了,但是对于高精度的惯导来说:理解加速度计还有陀螺仪的工作原理是非常重要的,因为你要分析惯导设备的工作原理。
二、解算模型
1前置学习任务
如果说最简单的模型仅仅从加速度计本身考虑,那么我们下面的结算不仅完全分析了加速度和陀螺仪的工作原理,还对加速度计和陀螺仪受外界影响因素进行了详细的分析
我们这里仍然参考武大的课程:武汉大学研究生组合导航课程合集
武汉大学研究生组合导航课程合集【2022年春】_哔哩哔哩_bilibili
需要认真学习其中的:
预备知识:
1.1 坐标系变换
1.2 INS研究的两个方向
1.3 四种位姿表示表换的方式
2.开始分析
2.1 陀螺仪加速度计分析
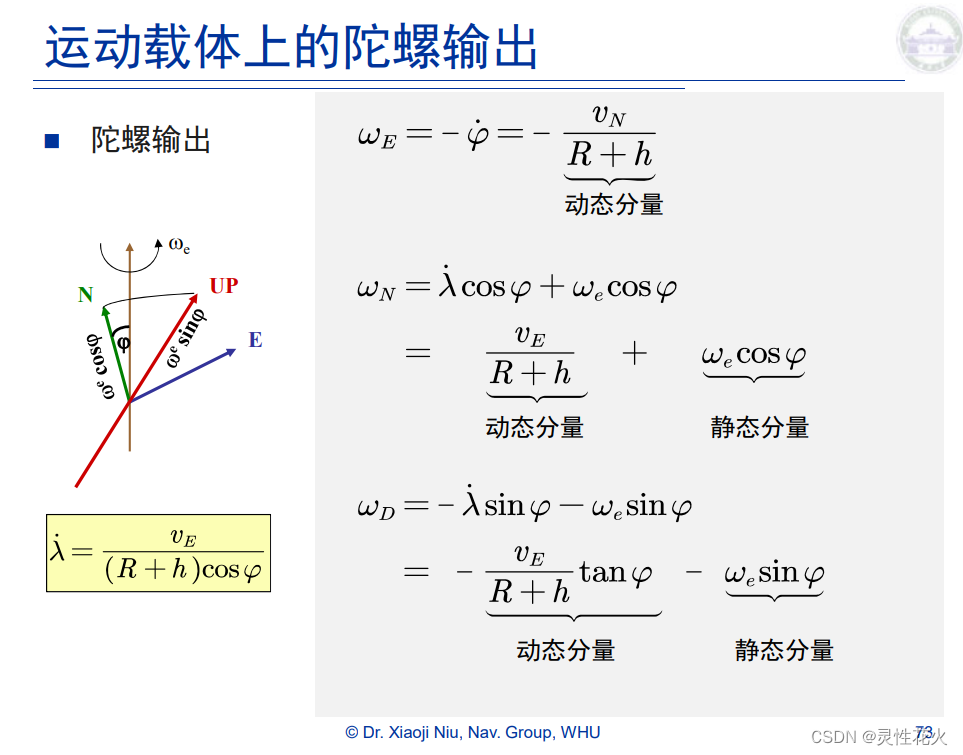
首先是需要了解惯性导航的两个方向:如果做的是运动的位置分析,那么你更多的是分析加速度计,毕竟一次积分获得速度,二次积分获取位置。但是你要是分析姿态,那你更多的是要分析陀螺仪,陀螺仪给出角速度信息,我们经过积分就是角度。
我们直接给出陀螺仪理论分析参数(陀螺仪比较简单),右侧给出加速度计参数
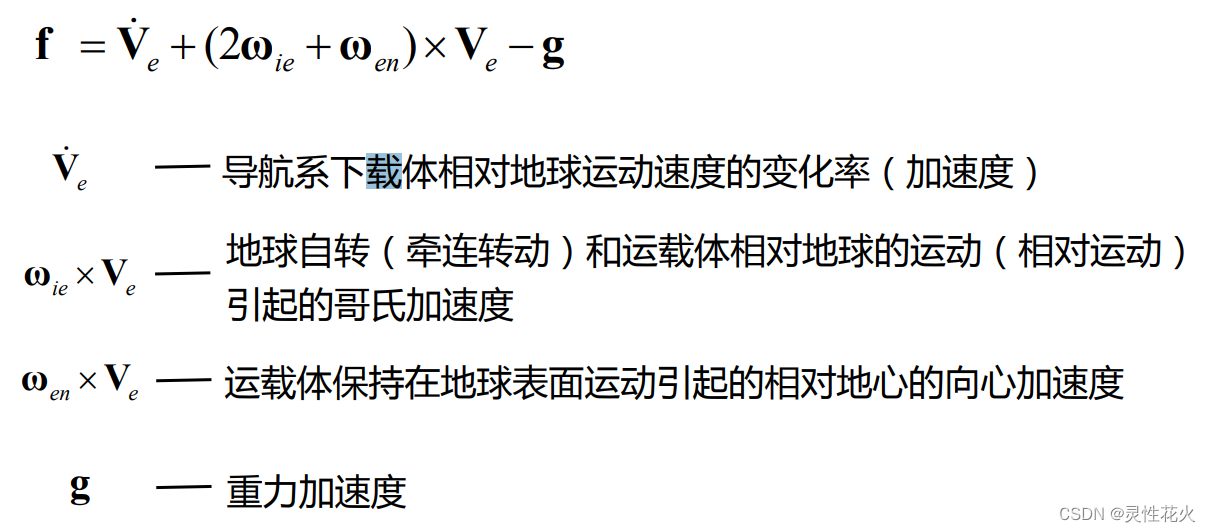
这里可能会对加速度计的公式有些疑惑:可以参考比力(加速度计输出的数据)的推导博客
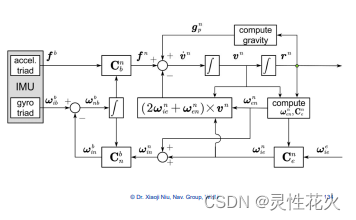
最后我们的机械编排就是这样(机械编排就可以理解为上面我们推出来的两部分):
2.2 姿态、速度(位置)更新
这三个更新比较麻烦,主要原因是因为复杂的变化+公式求导。上面2.1部分推导出来的仅仅是连续下的变化,但是实际上,IMU所采集的数据是离散的(隔一段时间会输出六个数据)。陀螺仪+加速度计输出的是两个时间点瞬间的变换,我们采用的是在原状态更新方式来对原状态进行变换。
对于陀螺仪输出的角速度——我们使用姿态四元素实现更新原状态(非常头皮发麻的公式)。
对于加速度计输出的比力——我们先直接积分然后拆分积分初始值、比力积分值、重力/哥氏积分三块。其中以:比力积分值最为复杂。之后还要对速度更新进行补偿,再次积分就是位置。
2.3 误差分析
前面简单的分析了惯性导航的力学公式,这里简单的说一下误差模型还有处理方式(误差建模)
要说明一点:陀螺仪是陀螺仪,加速度计是加速度计,但是二者误差的都能这样分类
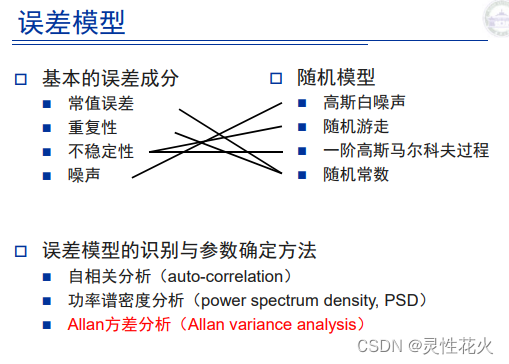
主要分为两块:
- 可直接补偿的误差——常值和重复性误差——标定补偿掉
- 不可直接补偿的误差——噪声——三种方法分析
有个疑惑?不稳定误差?咋办?是不是也用下面的三种方式随便分析出来(待续)
经典的几种分析噪声的方法:
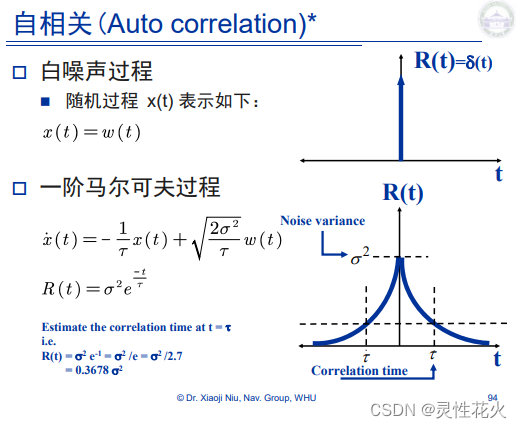 | 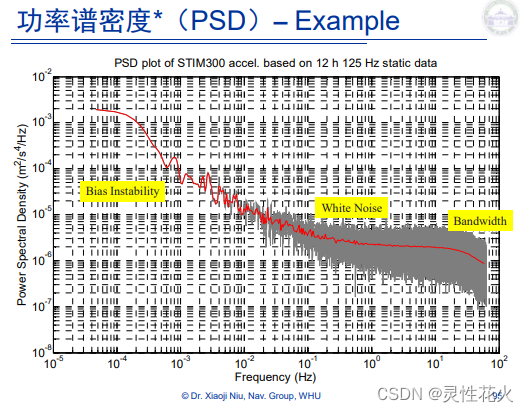 |  |
对于常值、还有重复性误差我们直接测出来然后补偿掉就行了,对于不稳定误差我们建立随机游走或者是一阶高斯马尔可夫模型。对噪声建立高斯白噪声模型。
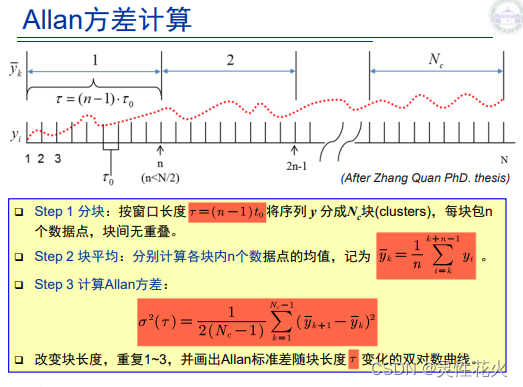
存在一个问题:上面说的三种误差分析方式,我都没具体深入了解。值得庆幸的是我们只需要深入了解Allan方差
使用Allan方差主要是为了标定加速度计的误差
参考https://blog.youkuaiyun.com/xhtchina/article/details/122417927
该方法首先有一定的数据(导航距离与时间数据)
Allan方差其实主要就是
这种操作的主要目的是为了:将比这个时间尺度更小的细节变化(短时间快速跳动)和比这个时间尺度更大的宏观变化(长时间缓慢漂移)忽视
最终得到:隔段时间的误差(短时间取样相交上一次取样的变化就认为是误差)
当然这就是简单的原理,实际上使用的还需要一些进一步的研究
参考严恭敏老师的Allan方差分析的使用要点
具体算法还没看


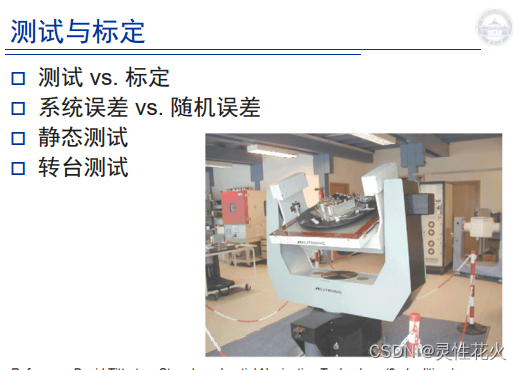
2.4 误差的补偿、标定
加速度计主要是根据上面说的分析方式进行补偿
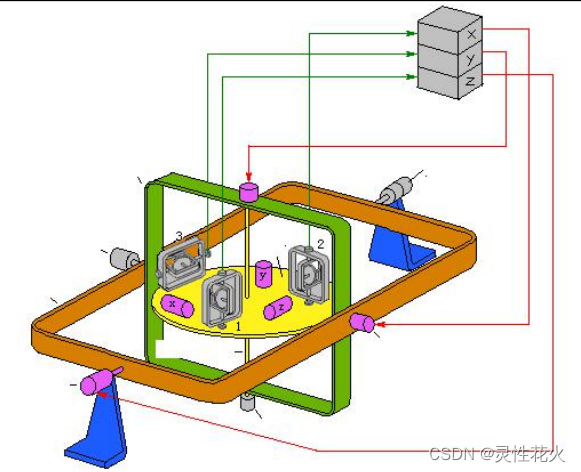
三轴转台主要是标定陀螺仪的常值误差(或者陀螺仪输出的位姿常值误差)

















 1323
1323

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









